

Robô Tartaruga controlado por micro:bit
Publicado em 2 de Junho de 2026 às 22:17

Você já imaginou transformar um micro:bit em um controle remoto para comandar um robô em formato de tartaruga marinha voltado para o monitoramento ambiental?
Neste projeto, vamos montar um robô tartaruga, um dispositivo controlado por rádio usando duas placas micro:bit: uma atuará como o controle remoto e a outra ficará embarcada no próprio robô. A tartaruga utiliza dois motores DC, uma ponte H e uma estrutura cortada em MDF combinada com um casco artesanal realizado a partir de papelão e EVA, .
A proposta foi desenvolvida no curso de Engenharia de Controle e Automação do Instituto Mauá de Tecnologia, dentro do contexto de criar soluções tecnológicas para avaliar os impactos do aquecimento global nas praias. Este material apresenta a montagem eletrônica com micro:bit, ponte H e motores, além de detalhar as diretrizes de funcionamento para que qualquer pessoa possa replicar o projeto.
Materiais Necessários
- 2 placas micro:bit
- 1 ponte H, como L298N ou módulo equivalente
- 2 motores DC com caixa de redução
- 2 rodas compatíveis com os motores
- 1 suporte de pilhas ou bateria para os motores
- 1 protoboard ou placa de conexão
- vários jumpers macho-macho e macho-fêmea
- 1 base para o casco da tartaruga
- 1 rodízio, esfera ou apoio traseiro
- 4 parafusos e porcas
- 1 rolo de fita dupla face
- vários papelões, MDF e material reaproveitado
Ferramentas Necessárias
- Furadeira
- Pistola de cola quente
- Cortador à laser
Etapas
Construção do Robô
-
Montagem Mecânica (base):
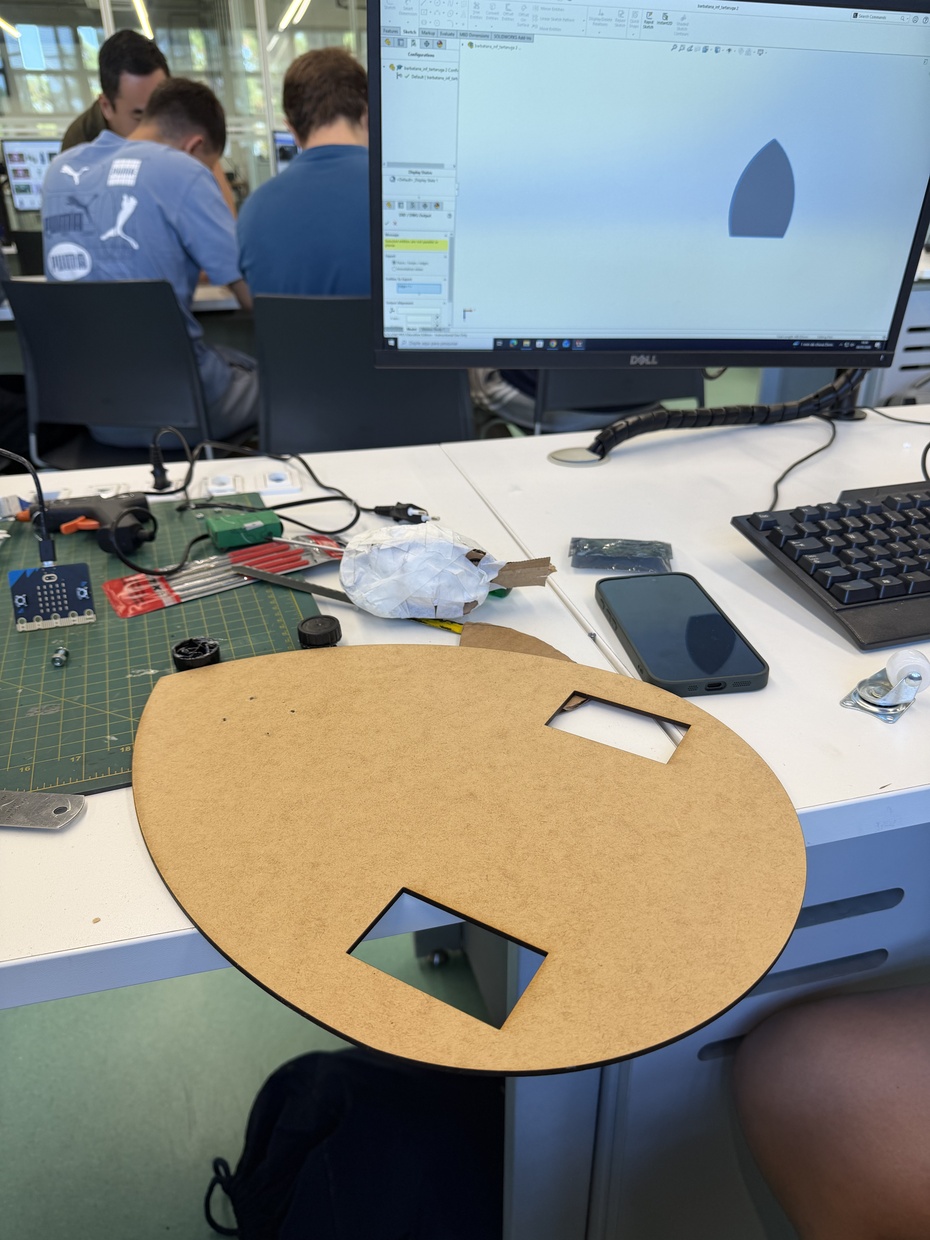
A base da tartaruga (chassi) foi realizada no software SolidWorks e cortada utilizando a maquina de corte à laser utilizando uma placa de MDF com formato semelhante a oval, e tamanho de 25x30cm, mas também podendo ser feito com impressão 3D ou papelão.
Durante o projeto da base, foram criadas duas aberturas retangulares (“janelas”) para o encaixe das rodas motorizadas, permitindo que parte das rodas ficasse exposta para contato direto com o solo, reduzindo a altura total do robô e melhorando sua estabilidade. Essas janelas também auxiliaram no alinhamento dos motores e evitaram atrito entre as rodas e a estrutura de MDF. Após o corte da peça, foram realizados furos com furadeira manual para fixação dos componentes mecânicos, principalmente da roda boba frontal, instalada com parafusos para garantir equilíbrio e apoio durante a movimentação.
-
Montagem Mecânica (casco):
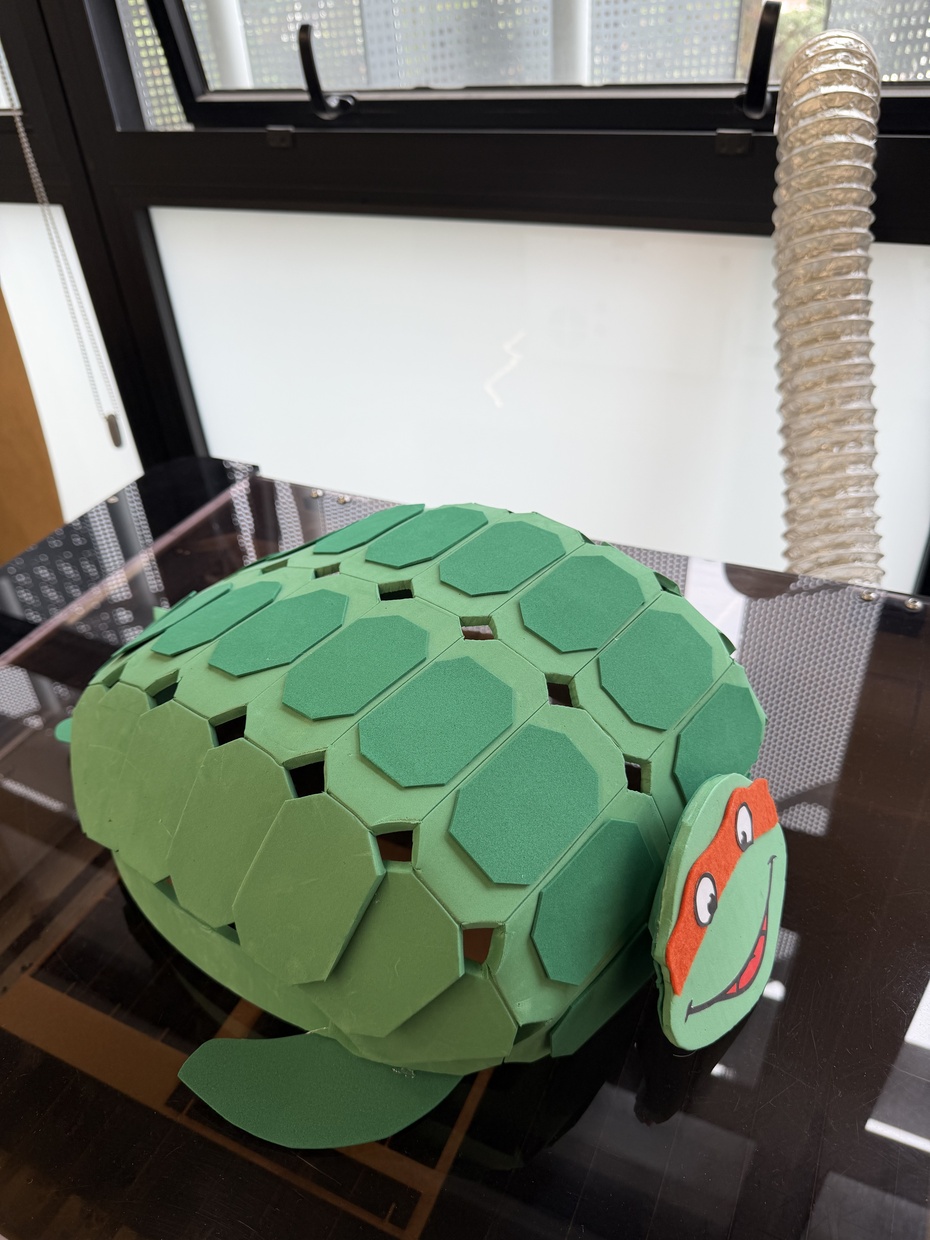
O casco da tartaruga foi desenvolvido artesanalmente utilizando papelão e espuma EVA, com o objetivo de criar uma estrutura leve, de baixo custo e visualmente semelhante ao casco de uma tartaruga marinha.
Inicialmente, foi construída uma estrutura curva utilizando papelão moldado manualmente e fixado sobre a base de MDF, formando o volume principal do casco. Em seguida, foram recortadas diversas peças geométricas (losangos) em EVA verde claro para compor a superfície externa, simulando as placas naturais presentes no casco de tartarugas. Sobre essas peças, foram adicionados detalhes em EVA verde escuro para criar profundidade e melhorar o acabamento visual. Todas as peças foram coladas manualmente utilizando cola quente, permitindo ajustes graduais na curvatura e alinhamento da estrutura. Durante a montagem, as peças laterais foram posicionadas em ângulo para acompanhar o formato arredondado do casco.
Além do casco principal, também foram produzidas as nadadeiras laterais e traseiras utilizando EVA recortado, fixadas na parte inferior da estrutura para reforçar a aparência de uma tartaruga marinha. A cauda foi construída com EVA em formato triangular alongado e posicionada na parte traseira do robô, complementando a identidade visual do projeto. A cabeça também foi confeccionada em EVA e personalizada com elementos inspirados no personagem Michelangelo das Tartarugas Ninja, incluindo máscara laranja, olhos e sorriso, tornando o robô mais amigável e atrativo visualmente.
-
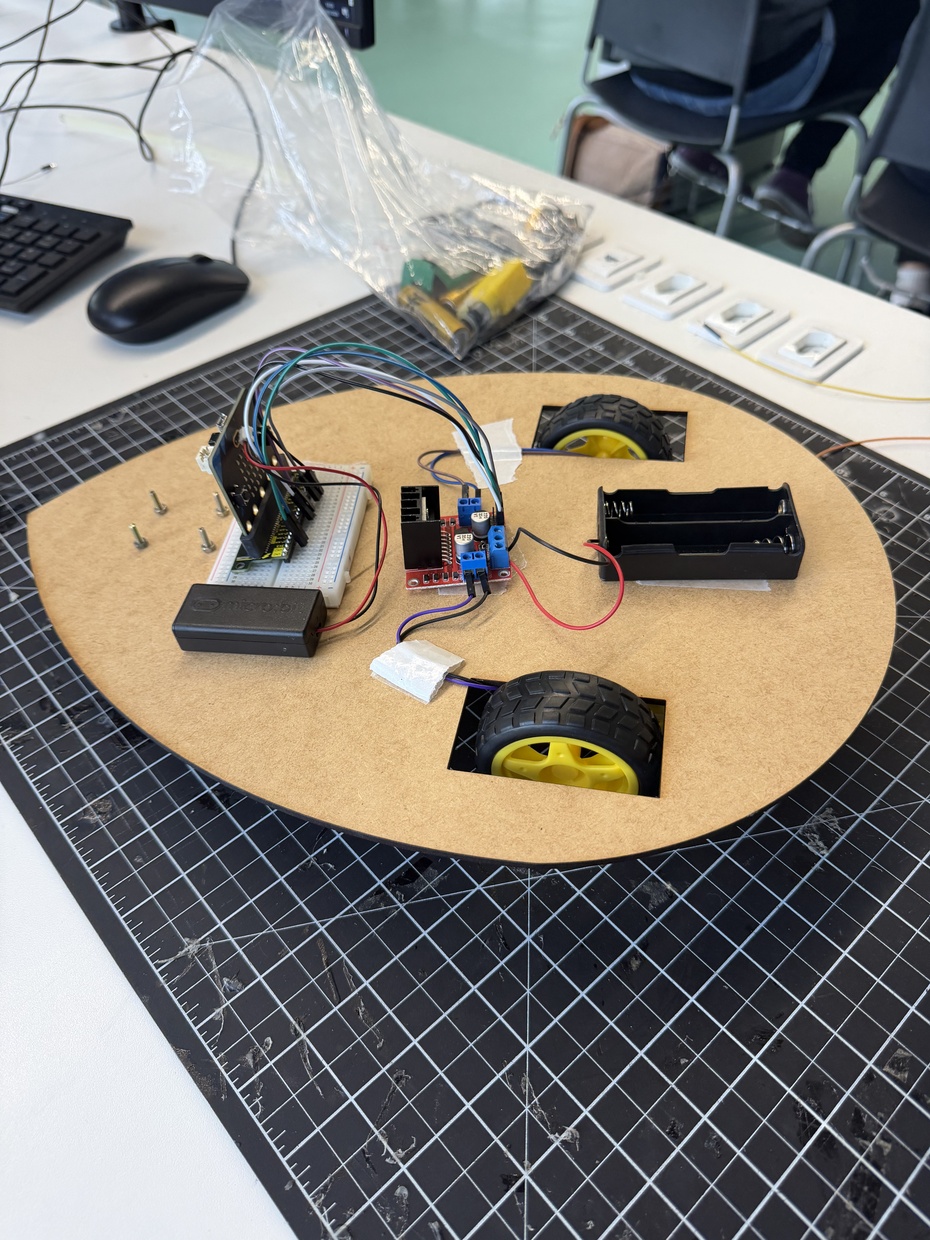
Montagem Eletrônica:
A montagem eletrônica pode ser dividida em cinco partes:
-conexão do sensor LDR com o micro:bit
- conexão do micro:bit com a ponte H;
- conexão da ponte H com os motores;
- alimentação dos motores com uma fonte externa.
O sensor LDR capta a intensidade da luz e diminui ou aumenta a resistência caso a luz tenha intensidade alta ou baixa respectivamente e manda essa informação para o micro:bit.
O micro:bit envia sinais para controlar os dois motores por meio de pinos digitais e pinos analógicos/PWM. A ponte H recebe esses sinais e aciona os motores.
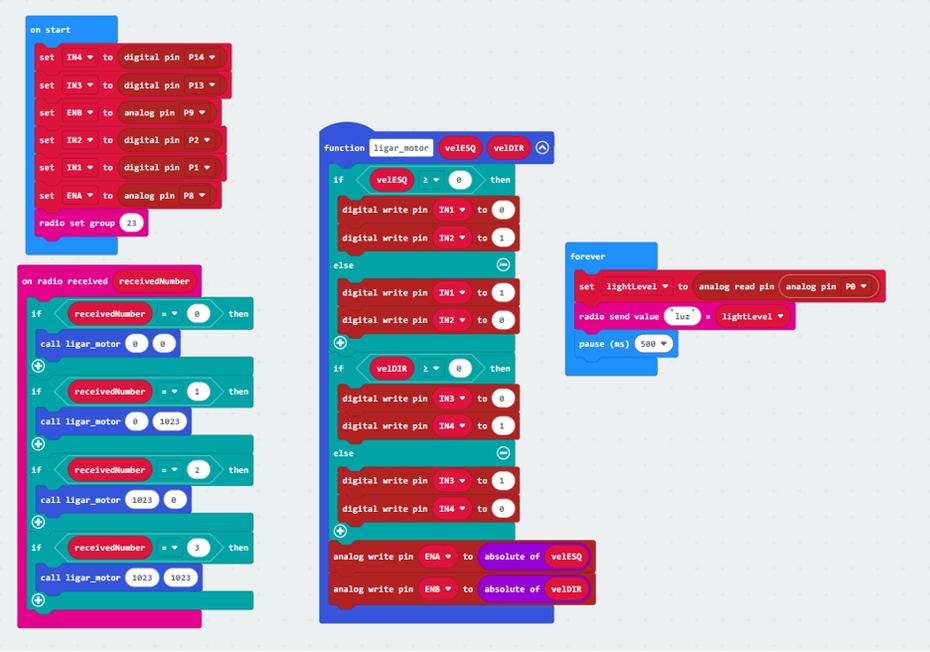
A ligação utilizada dos pinos do micro:bit para a Ponte-H foi:
- Controle de velocidade do motor esquerdo: P8
- Sentido do motor esquerdo - IN1: P1
- Sentido do motor esquerdo - IN2: P2
- Controle de velocidade do motor direito: P9
- Sentido do motor direito - IN3: P13
- Sentido do motor direito - IN4: P14
Com o sensor LDR sendo ligado no micro:bit com:
-O pino VCC do sensor no 3v3
-O pino GND ligado no GND
-O pino DO no P6
Dependendo do sensor e a Ponte-H a posição ou nome dos pinos podem ser diferentes dos que foram utilizados.
Testes e Melhorias Possíveis
-
Testes do projeto
1. Antes de colocarmos os componentes eletrônicos no base do nosso robô nós verificamos se todos os fios estavam conectados corretamente, como os fio de voltagem e dos motores da Ponte H que precisam ser apertados em cima para não saírem do lugar, testamos um motor de cada vez e os dois ao mesmo tempo, junto de verificar se eles paravam quando previsto. Após termos certeza que o circuito estava funcionando fixamos os motores na parte de baixo da base e o resto dos componentes em cima também prendendo alguns fios soltos com fita. Assim podemos testar se a base não era pesada ou leve demais e se o robô andava reto quando os dois motores estavam ligados e girava para o lado previsto quando apenas um deles estava. Junto de verificar com a lanterna do celular se o valor da luz estava sendo recebida pelo micro:bit controlador e enviada corretamente para o micro:bit do controle mostrando no gráfico do monitor serial.
2. Possíveis problemas
- O motor não gira: verifique se as pilhas estão na orientação certa, carregadas e se os cabos da bateria para a Ponte H estão conectados e fixados corretamente.
- O robô não anda reto e fica girando: inverta os fios conectados de um dos motores à Ponte H e verifique o código novamente.
- O robô não está mexendo ou enviando os valores da luz: verifique se o micro:bit que está dentro do robô está conectado com a sua bateria externa que é diferente da bateria da Ponte H e se os dois micro:bits estão com os seus respectivos códigos baixados neles com o mesmo grupo de rádio.
- O robô está andando lento ou de forma intermitente: a base e o casco podem ser pesados demais para os motores aguentarem ou as pilhas podem estar descarregadas ou os fios com mau contato, verifique esses dois, caso saiba que não é pelo peso.
- O valor recebido de luz é apenas 1 e 2: verifique se o sensor de luz sendo utilizado é analógico, pois se não está mostrando a variação da luz significa que ele pode ser um sensor digital e verifique se o código está sempre rodando em loop.
3. Possíveis melhorias
- Adicionar um comando de ré
- Adicionar um sensor ultrassônico, como o HC-SR04, para ver a distância de obstáculos ou criaturas se aproximando.
Programação do robô
-
O micro:bit dentro do robô servindo como controlador:
Esse micro:bit tem como objetivo receber os comandos de rádio do micro:bit controle e acionar um dos motores ou os dois ao mesmo tempo e pará-los, junto com também receber as informações do sensor de luz (LDR) e manda-los para o computador em que o micro:bit controle estiver conectado.
No código primeiro é definido os pinos conectados da Ponte-H, definir os grupos -
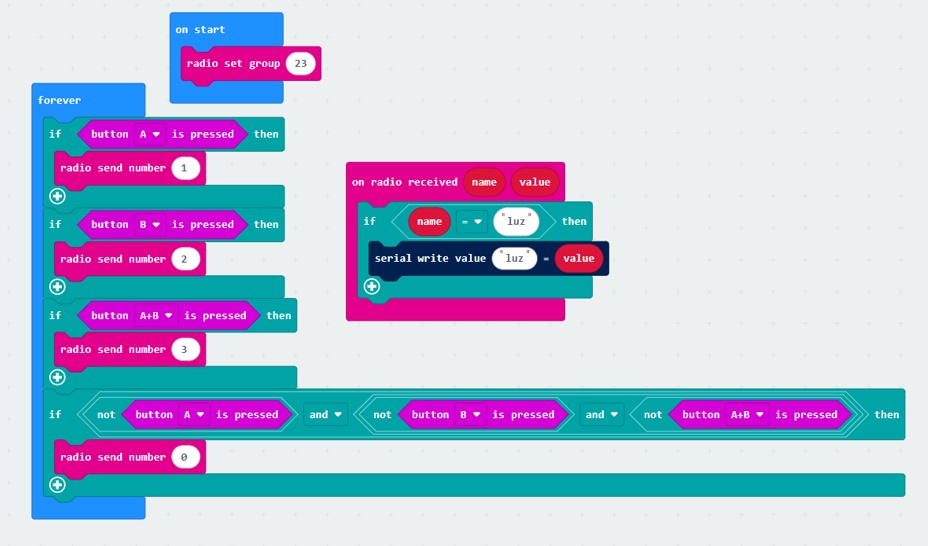
O micro:bit do controle:
O segundo micro:bit como o controle do robô e é onde será mostrado as informações coletadas pelos sensores.
No programa do controle o grupo de rádio é escolhido como o mesmo grupo de rádio que o do robô (nesse caso 23), junto com enviar os números, por rádio, responsáveis pelas ações do robô e receber os valores nomeados de "luz" e "dist" pelo rádio e mostrá-los em um gráfico no monitor serial.
Os comandos para enviar os números foram:
-Ao apertar o botão A: enviar número 1
-Ao apertar o botão B: enviar número 2
-Ao apertar o botão A+B: enviar número 3
-Ao apertar nenhum botão: enviar número 0
-
O micro:bit do controle:
Conclusão
Este robô tartaruga controlado por micro:bit prova que tecnologia de monitoramento ambiental não precisa ser cara nem complexa. Com uma base simples em MDF, EVA e componentes acessíveis, o nosso robô une engenharia, criatividade e consciência ambiental em um único projeto, coleta dados reais de incidência solar e distância, se move de forma controlada por rádio, com a Ponte H controlando os motores.
Comentários
1ficou ninja! 🤭