

Projeto Engenharia, Sustentabilidade e Impacto Social - PANGOLIM
Publicado em 2 de Junho de 2026 às 21:31
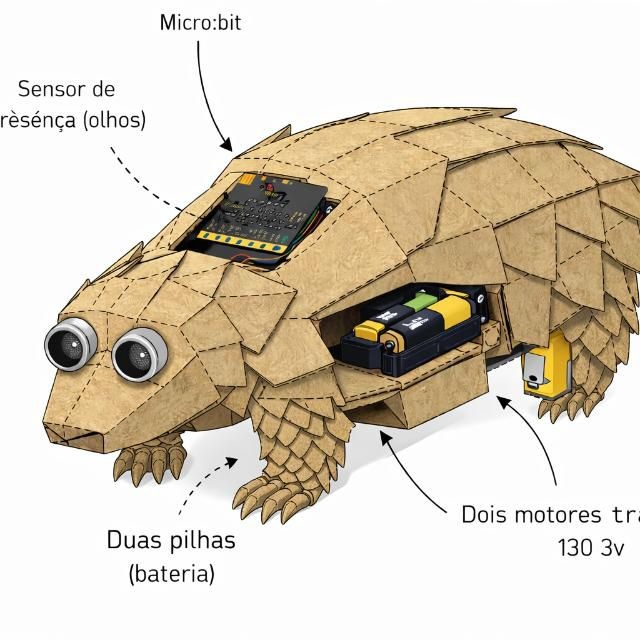
O projeto central é o desenvolvimento de um robô focado no monitoramento ambiental, unindo hardware, software e consciência ecológica. Nossa equipe escolheu desenvolver o robô se baseando no Pangolim, animal mamífero do Sul da Ásia/África, peculiar e pouco conhecido. Por suas características visuais como a pele escamosa, rabo e nariz pontiagudo é muito confundido com Tatus e Tamanduá.
O pangolim é essencial quando tratamos do equilíbrio ecológico, sendo um controlador natural de pragas como formigas e cupins, além de ser um engenheiro do solo através de suas escavações, areando a terra. Mesmo com sua grande importância ecológica, ele é o mamífero mais traficado no planeta, o tráfico é impulsionado pelo mercado ilegal de sua carne, representando luxo e pelo uso de suas escamas de queratina na medicina tradicional asiática. Essa exploração predatória, somada à perda de habitat e à baixa taxa de reprodução da espécie, coloca o Pangolim em risco crítico de extinção. Além disso seu principal mecanismo de defesa é se enrolar sobre o próprio corpo, assim facilitando a captura por traficantes, tornando urgente a proteção internacional para evitar o colapso de suas populações.
Arquivos do Projeto
1.04 MB
1.86 MB
696.00 KB
120.02 KB
1.40 MB
Materiais Necessários
- 250ml de Tinta Guache Marrom
- 250ml de Tinta Guache Branca
- 37ml de Tinta para Tecidos Marrom
- 180g de Massa Biscuit Branco
- 180g de Massa Biscuit Marrom
- 180g de Massa Biscuit Preto
- 1 Tinta Marrom em Spray
- 1 Placa de MDF 3ml 50x40
- 3 Folhas Paraná
- 7 Tubos de Cola Quente
- 1 Fita Crepe
- 3 Papelões
- 1 Micro Bit Adapter
- 2 Micro Bit BBC
- 1 Sensor de Temperatura e Umidade DHT11
- 1 Sensor Ultrassônico de Distância HCSR04
- 1 Roda Dianteira
- 1 MH Sensor Series TCRT5000
- 1 Ponte H L298N
- 2 Motores
- 2 Rodas Traseiras
- 1 Compartimento de Baterias Grande
- 1 Compartimento de Bateria Pequeno
- 1 Protoboard
Ferramentas Necessárias
- Régua
- Paquímetro
- Pistola de Cola Quente
- Lápis
- Borracha
- Caneta
- Estilete
- Tesoura
- Teclado
- Mouse
- Monitor
- Computador
- Cortadora Laser
- Lima
- Pincel Médio
Etapas
1° Etapa - Introdução ao Projeto
-
Este projeto tem como objetivo desenvolver um protótipo de robô que seja equipado com sensores e microcontrolador, para adquirir dados ambientais em habitats naturais.
O robô deverá conseguir se camuflar em meio ao ambiente e operar de modo que não impacte de forma negativa o habitat monitorado.
O projeto acabará em uma mostra onde os projetos serão avaliados pelos colegas e por uma banca de professores.
O robô terá em sua avaliação 5 critérios que serão considerados de forma minuciosa, sendo elas:
Criatividade;
Complexidade;
Execução;
Apresentação;
Documentação.
Além disso, o projeto está altamente relacionado com os Objetivos de Desenvolvimento Sustentável que foram adotadas pela ONU para eliminar a pobreza, proteger o planeta e garantir paz e prosperidade, tendo com as relacionadas essas metas globais:
4 | Educação de Qualidade
9 | Indústria, Inovação e Infraestrutura
11 | Cidades e Comunidades Sustentáveis
13 | Ação Contra a Mudança Global do Clima
14 | Vida na Água
15 | Vida Terrestre

2° Etapa - Desenvolvimento Conceitual
-
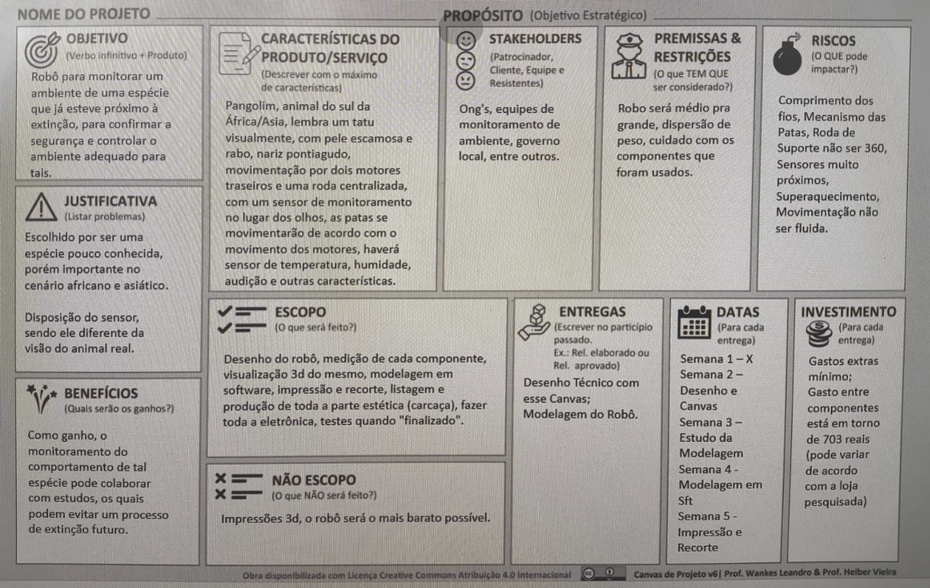
Após a Introdução foi-se necessário discutir sobre alguns conceitos de extrema importância para a produção e desenvolvimento do Projeto, os tópicos discutidos foram:
- Objetivo (Motivações e Metas);
- Justificativa (Apontamento de Problemas);
- Benefícios (Possíveis Ganhos);
- Características do Produto (Idealização do Produto Final);
- Escopo (O que será feito);
- Não Escopo (O que não será feito);
- Stakeholders (Patrocinadores, Clientes, Equipes e Resistentes);
- Premissas e Restrições (Considerações e Limitações);
- Riscos (O que pode Impactar)
- Entregas e Datas (O que deverá ser entregue e Quando);
- Investimento (Gastos Gerais).
A seguir cada equipe teve 5 minutos para apresentar e explicar seus conceitos e ideias à turma e aos professores, mais 3 minutos de esclarecimento de possíveis dúvidas.
3° Etapa - Produção e Validação do Mockup Físico
-
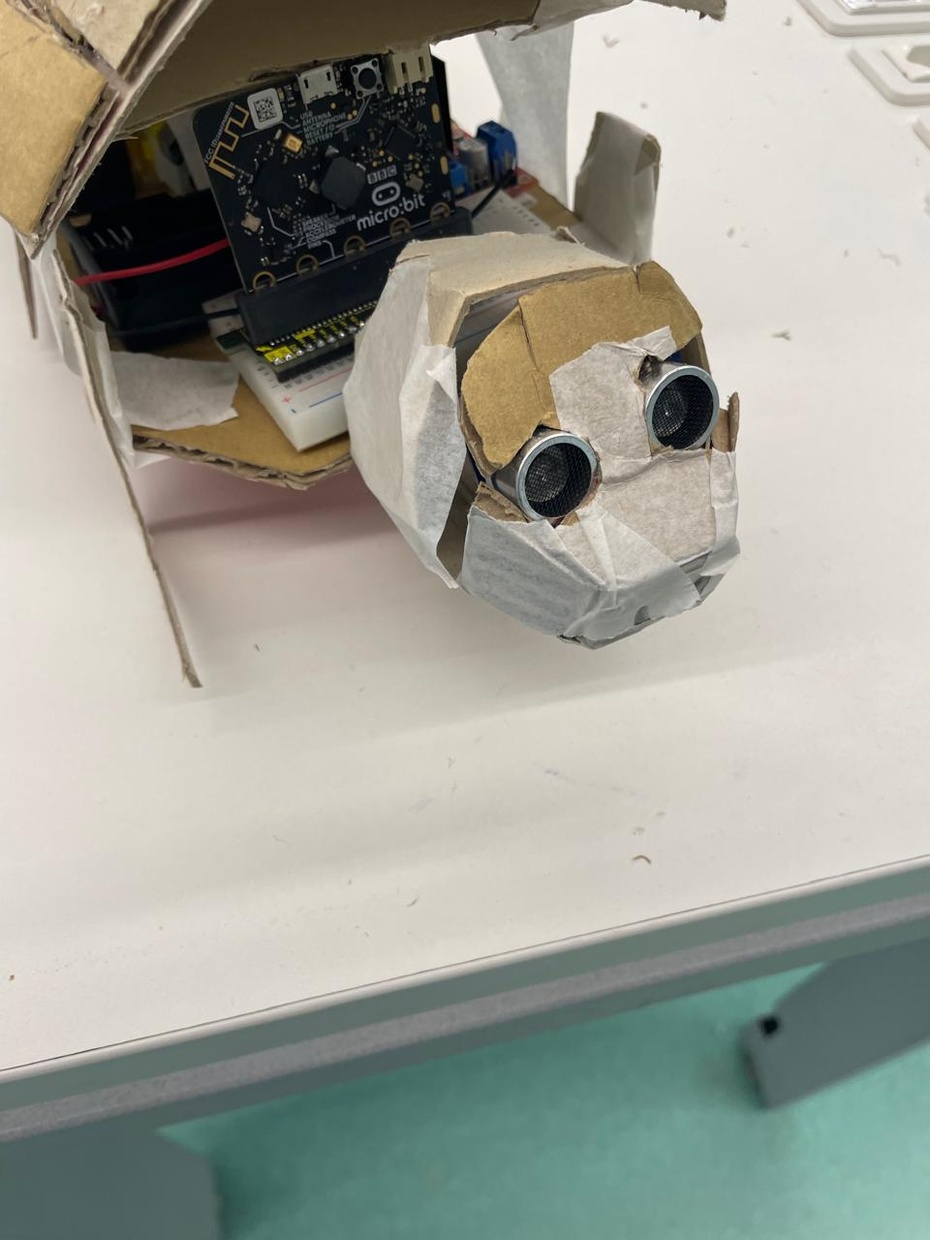
Nesta etapa foi o início da exploração da parte física do nosso projeto, onde fizemos um modelo físico em escala aproximada ao nosso produto final, utilizamos ele para verificar o design, a forma e a ergonomia, vendo também a disposição da parte eletrônica e se a estrutura é viável. Nessa disciplina, usamos materiais recicláveis para praticar o Ecodesign, por isso nossa equipe utilizou papelões, colas e fitas, como foi nos instruído.
No nosso Mockup elaboramos com papelão a barriga/base do protótipo, suas costas, junto de suas escamas e seu rosto, depois anexamos todas as partes e posicionamos a parte eletrônica para obter uma visualização melhor de como ficaria organizado futuramente.
4° Etapa - Modelagem CAD
-
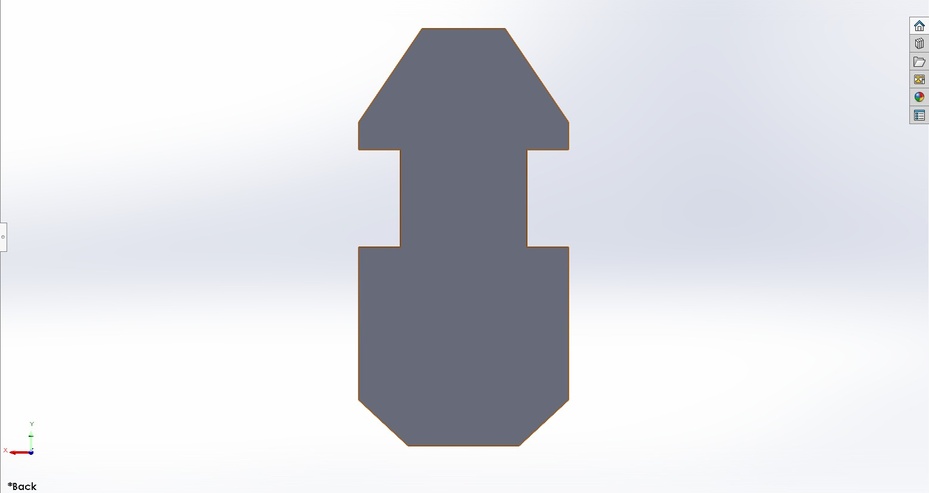
Com o Mockup físico pronto, a próxima etapa era a Modelagem CAD, onde faríamos a modelagem completa das peças que seriam essenciais para a base e o suporte para os componentes, sendo todos medidos de forma precisa para que não houvessem margens de erros que comprometessem o projeto.
Ao todo fizemos 7 peças, sendo elas duas escamas variadas, a chapa do nosso projeto, dois suportes de cabeça e dois suportes de pescoço todas desenhadas no SOLIDWORKS.
Depois de prontas enviamos os modelos para a cortadora laser e elas foram produzidas em uma Placa de MDF 3ml 50x40, somente as escamas foram produzidas no papel paraná.
5° Etapa - Estrutura Física
-
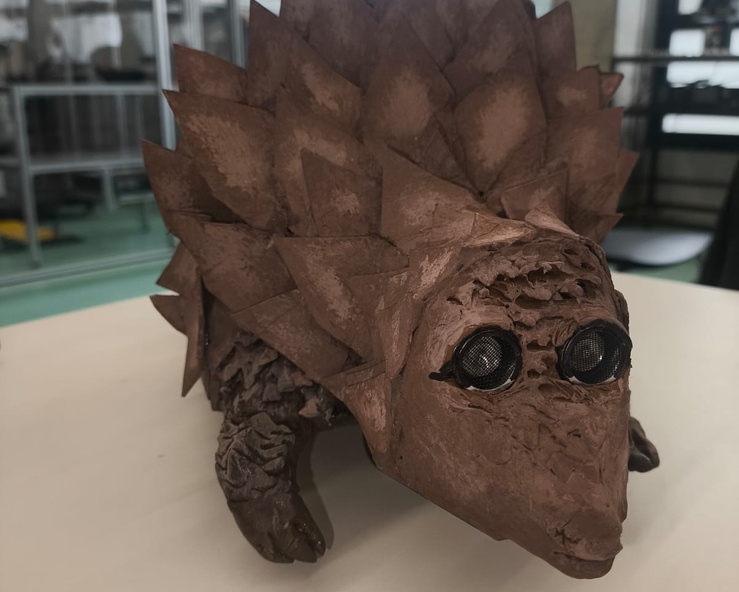
Com a validação do Mockup Físico e da confecção do Modelo CAD, estávamos aptos a construir o modelo real do robô, então trabalharíamos em sua maioria no design do projeto. Nossa equipe no início desejava fazer as costas e as escamas com papel machê, já as patas, o rabo e o acabamento do rosto/cabeça com massa de biscuit.
Então nos juntamos após a aula e começamos a produzir manualmente o papel machê, onde utilizamos papel picotado, cola branca e tinta para a coloração, porém não esperávamos que demorasse tanto para a secagem e que ficasse tão pesado, então optamos por outra alternativa em relação às costas/escamas, que seria o uso de papel paraná onde tonaria o robô mais leve e mais prático, além de que só foi necessário a pintura de suas partes com Spray de Tinta Marrom.
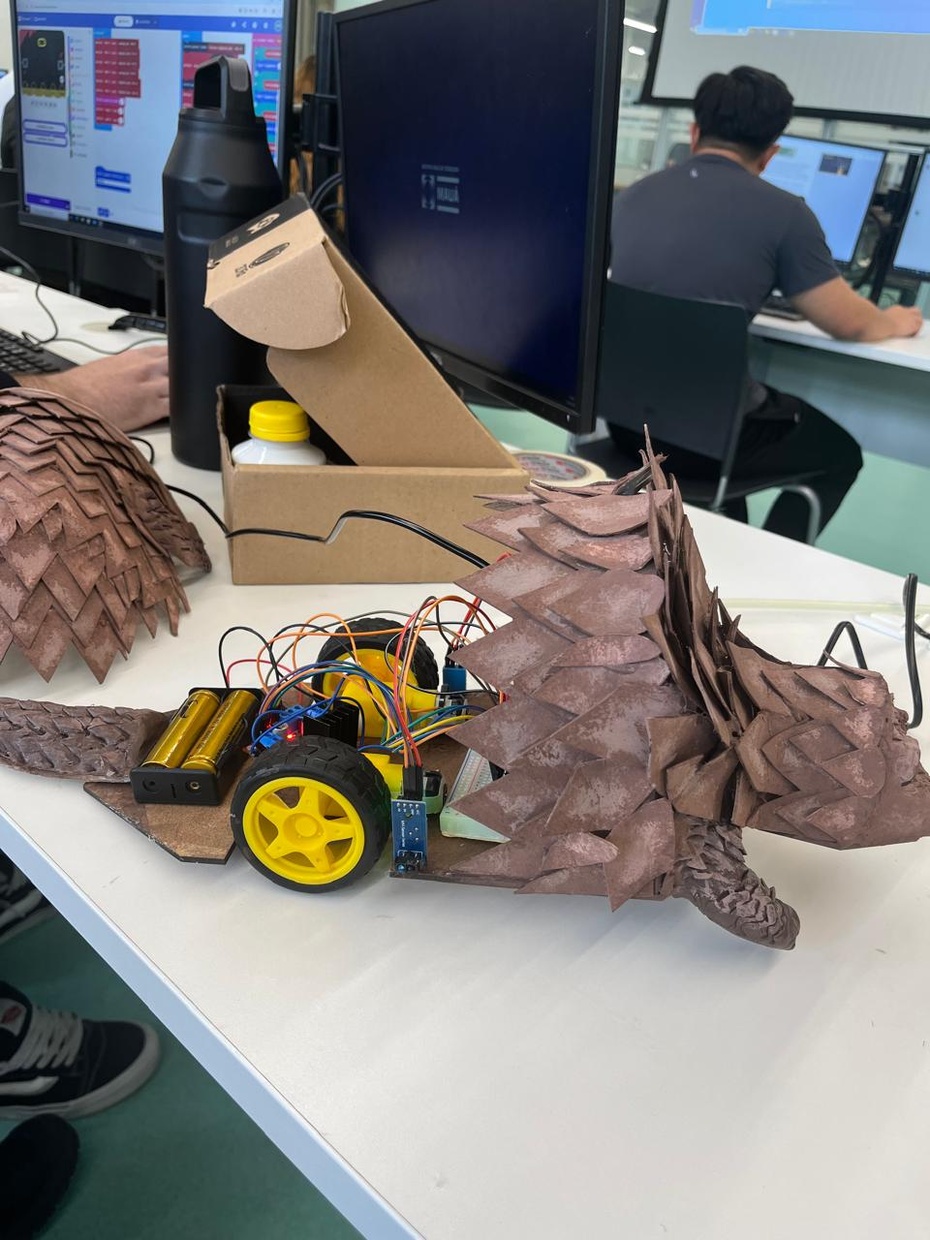
Com essa parte finalizada posicionamos a parte eletrônica dentro da carcaça do modo organizado que desejávamos e demos início à produção das patas dianteiras e traseira, o rabo e a modelação do rosto/cabeça com biscuit. Houveram algumas dificuldades como as patas que deveriam ser leves, formatos parecidos e que não atrapalhassem a mobilidade do robô, mas após algumas tentativas elas foram executadas com sucesso. O rabo no geral não gerou muitos problemas, só precisamos considerar o fator do peso. Esses critérios também foram analisados na produção do rosto/cabeça, onde foi preciso modelar sem que interferisse nos sensores que representam seus olhos, além do peso e do design, com toda esses quesitos considerados finalizamos a parte física do nosso projeto.

6° Etapa - Eletrônica
-
Com a estrutura física finalizada nos deslocamos para a parte eletrônica do projeto, onde iriamos programar os comandos e ações do nosso robô. O Micro:bit tinha a função de processar os comandos de rádio, já a Ponte H L928N controlaria os motores DC, para realizar os códigos utilizamos o Tinkercad.
Programamos as conexões principais, então o P1/P2 que seria responsável pela Direção do Motor Esquerdo (IN1/IN2), o P13/P14 pela Direção do Motor Direito (IN3/IN4) e o P8/P9 pelo Controle de Velocidade (ENA/ENB). Depois foram os botões onde os Botões A/B seriam responsáveis separadamente de movimentos específicos, a junção dos dois (A+B) a deslocação frontal e o Logotipo pela Parada do movimento. Além disso, três sensores também foram utilizados que seria o MH Sensor Series (TCRT5000) para a luminosidade, o Sensor DHT11 para a temperatura e umidade e o Sensor Ultrassônico HCSR04 para a distância.
Testes e Observações
-
Com o robô montado, realizamos testes práticos para avaliar a movimentação via rádio, o controle dos motores pela Ponte H L298N e a leitura dos sensores DHT11, HCSR04 e TCRT5000. O protótipo respondeu aos comandos programados, mas revelou oportunidades de melhorias estruturais e de planejamento:
Materiais e Custos: O uso de massa de biscuit para as patas, rabo e cabeça aumentou o custo e o peso do robô. Poderíamos ter minimizado os custos utilizando materiais mais simples, leves e ecológicos, como papelão reciclado.
Eletrônica: Os componentes na protoboard geraram muitos fios. A eletrônica poderia ter sido melhor otimizada com conexões mais diretas para evitar riscos de mau contato.
Otimização de Tarefas: O tempo gasto na tentativa frustrada com o papel machê gerou atrasos. Uma melhor otimização e divisão das tarefas entre a equipe teria evitado a sobrecarga na finalização da estrutura física.
Conclusão
Desenvolver o projeto Pangolim foi uma jornada rica em aprendizados. Conseguimos unir a engenharia prática à urgência da preservação ambiental, usando a tecnologia para dar visibilidade a um dos mamíferos mais ameaçados do planeta.
Ao longo do processo, aprendemos a recalcular a rota quando necessário, como quando trocamos o papel machê pelo papel paraná para deixar o robô mais leve e ágil. Da precisão do desenho no SOLIDWORKS à montagem final, ver o Micro:bit controlando os motores e os sensores de temperatura, distância e luz funcionando integrados mostrou que nossa ideia saiu do papel com sucesso.
Mais do que criar um protótipo funcional alinhado às metas de sustentabilidade da ONU, este projeto provou para nós que a tecnologia pode e deve ser uma grande aliada na proteção da nossa biodiversidade.
Comentários
1bem legal, parabéns!