

Peixe controlável com microbit Mauá
Publicado em 2 de Junho de 2026 às 22:07
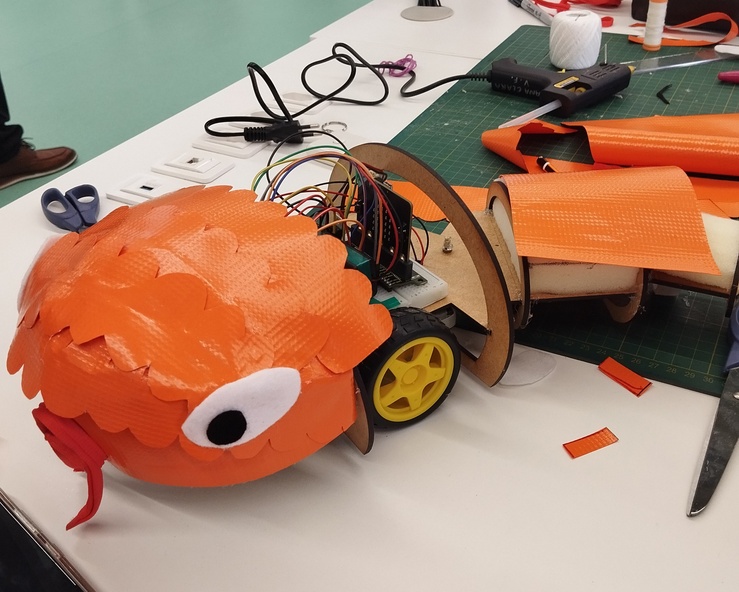
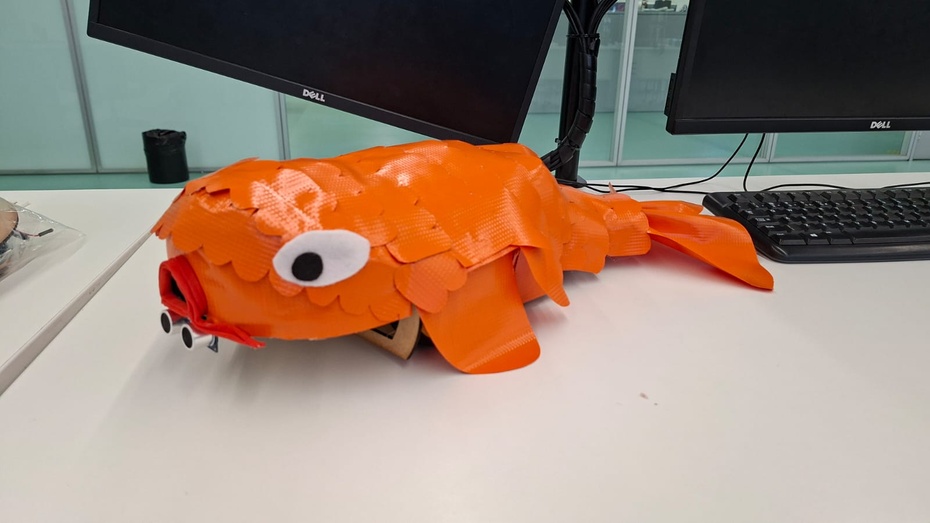
O "Peixoto" é um robô móvel controlável e com funções autônomas. Inspirado visualmente em um peixe da espécie Carpa-Koi, o robô possui uma estrutura personalizada feita em MDF com encaixes precisos, trazendo um design diferenciado e ao mesmo tempo funcional.
Apesar da aparência temática, o foco principal do projeto está na sua capacidade de locomoção e prevenção de colisões.
O sistema foi desenvolvido para ser totalmente controlável e também capaz de operar de maneira autônoma. Utilizando um sensor ultrassônico HC-SR04, o robô consegue detectar obstáculos e paredes à sua frente. Quando identifica que está prestes a colidir, o "Peixoto" executa automaticamente movimentos de desvio, alterando sua trajetória para evitar impactos, independente do controle do usuário.
A estrutura mecânica foi projetada em SolidWorks, incluindo modelos 3D e peças em MDF de 3 mm cortadas com encaixes planejados para facilitar a montagem e garantir estabilidade ao conjunto. O projeto combina conceitos de modelagem 3D, eletrônica, programação e automação.
O controle do robô é realizado através da placa Micro:bit, responsável pela leitura do sensor e acionamento dos motores. O sistema de movimentação utiliza dois motores DC 5V conectados às rodas, controlados por um módulo ponte H, permitindo movimentos como avanço, ré e curvas.
A Programação é realizada pelo próprio programa da placa Micro:bit, a qual é realizada por blocos, que pode ser facilmente convertida para a linguagem Python.
Detalhes do Projeto
Robô autônomo com sistema de prevenção de colisões
Conceitos de eletrônica, programação e modelagem 3D
Estrutura personalizada com encaixes em MDF
Integração entre hardware e software em robótica
Design Lúdico com traço acolhedor e estética amigável
Componentes Utilizados:
2 Porta bateria do microbit
2 Placas Micro:bit
Sensor ultrassônico HC-SR04
2 motores DC 5V
2 rodas para motores 5V
Módulo ponte H
Protoboard
Jumpers
Estrutura em MDF 3 mm
Suporte para duas baterias 3,7V
Regulador de tensão L7805
(Modelos e peças desenvolvidos em SolidWorks)
Arquivos do Projeto
82.99 KB
Materiais Necessários
- 2 Porta bateria do microbit
- 2 Pilha da bateria microbit
- 2 Microbits
- Sensor ultrassônico HC-SR04
- 2 motores DC 5V
- 2 rodas para motores 5V
- Módulo ponte H-L298N
- Protoboard
- 12 Jumpers
- Estrutura em MDF 3 mm
- Suporte para duas baterias 3,7V
- Duas baterias 3,7V
- Regulador de tensão L7805
- 1 Micro USB
- 6 parafusos 3mm
- 6 porcas com furo 3mm
- Rodízio Giratório Placa Base Roda Nylon Diâmetro 25mm
- (Modelos e peças desenvolvidos em SolidWorks)
- Espuma D-33
- Lona de polietileno trançado
- Feltro (Detalhes)
- Tubos de cola quente
- Fita adesiva emborrachada
Ferramentas Necessárias
- Pistola de cola quente
- Tesoura
- Estação de solda
- Chave philips pequena
- Canetão
- Régua
- Fita métrica
- Alicate de corte
Etapas
Esquema e colagem dos componentes
-
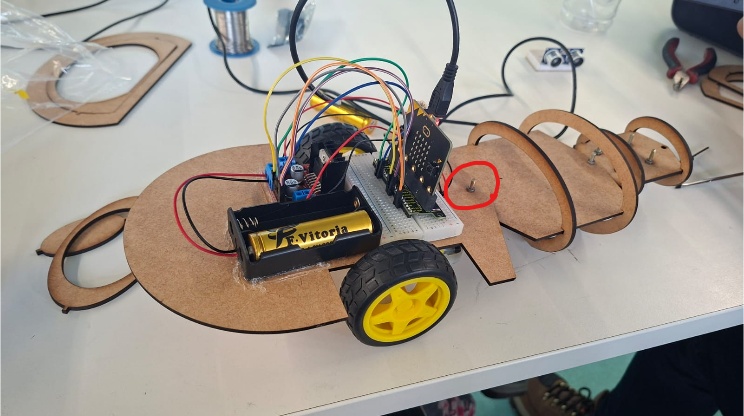
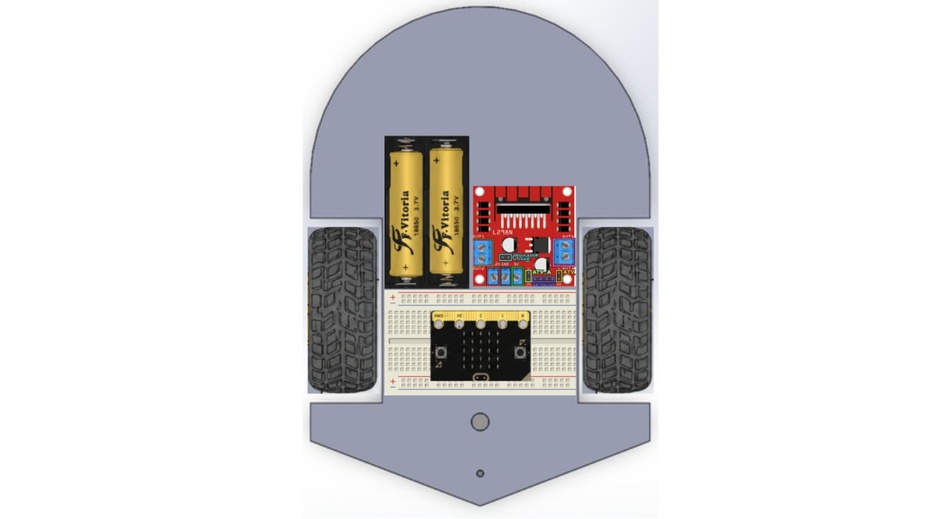
Agora posicione os componentes igualmente a imagem. (Não colocar tampando o buraco da passagem dos fios)
Retire o adesivo do protoboard e cole na placa, e cole o resto dos componentes com cola quente
-
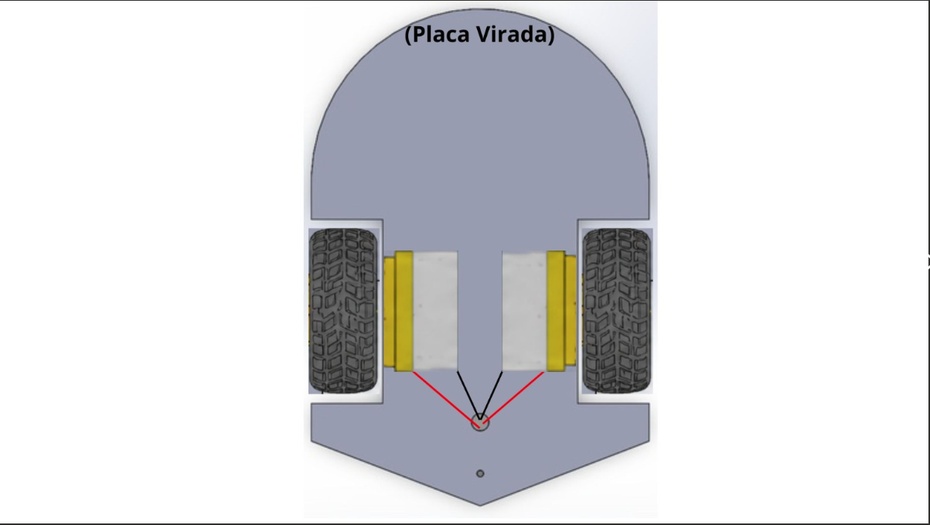
Vire a placa e cole os motores 5V
Protótipagem e impressão CAUDA e BASE
-
Segue os arquivos acima para fazer o download das peças do peixe no SolidWorks
2 peças para cauda
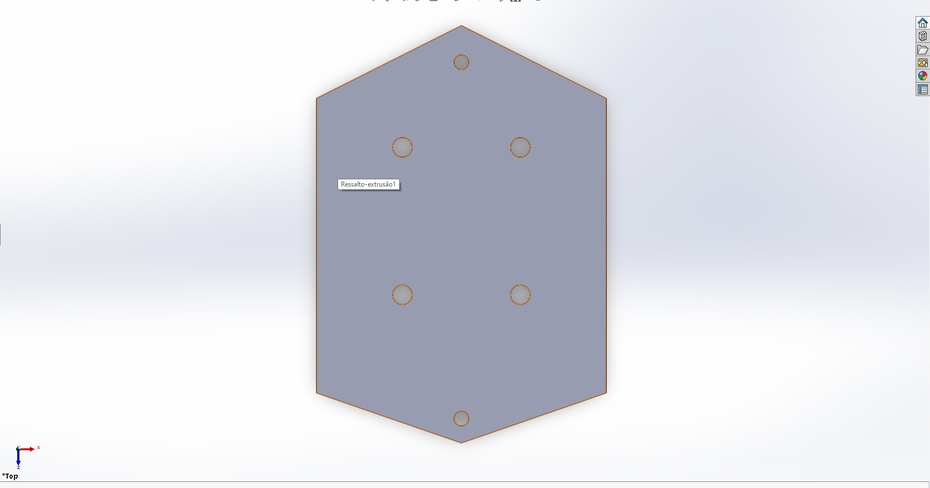
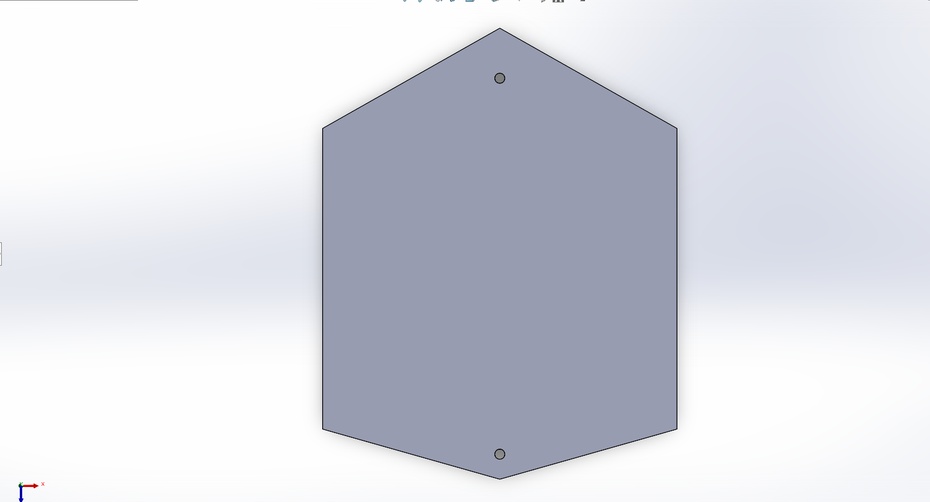
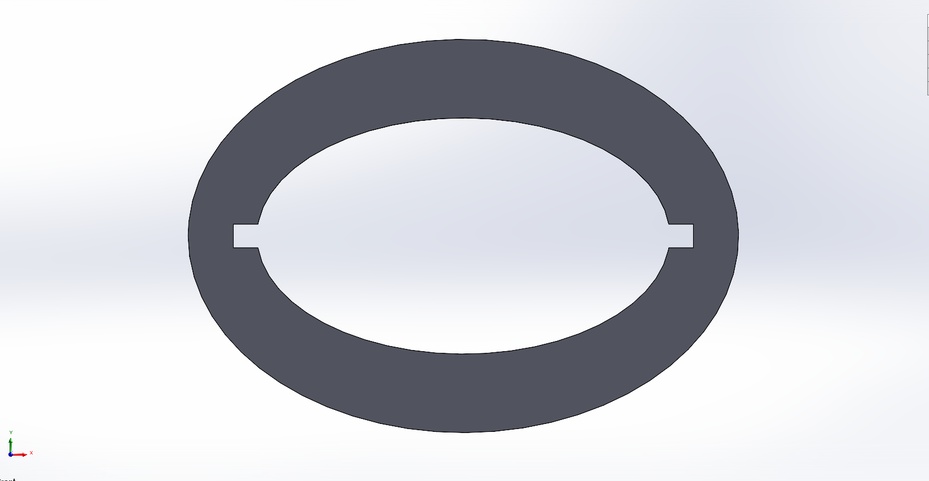
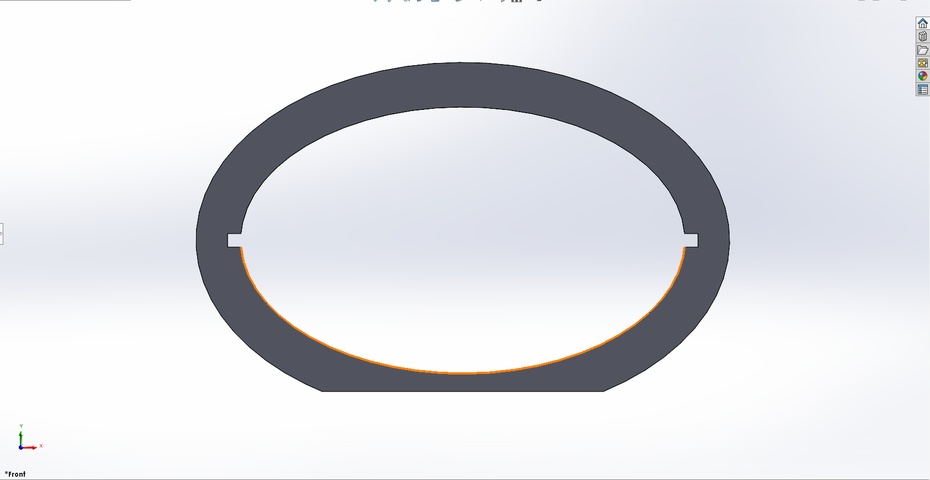
3 peça arcos estruturais
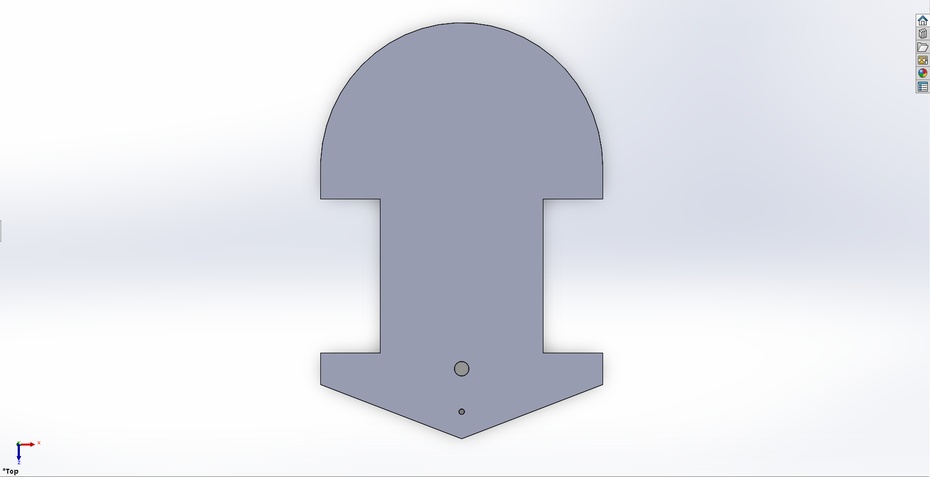
1 peça base suporte hardware
-
Cauda peixe pequeno
-
Cauda peixe médio
-
Arco peixe pequeno
Integrantes
-
O grupo responsável pela criação do projeto é composto por alunos do 1º semestre do curso de engenharia, sendo eles:
Afonso de Oliveira – RA: 26.00334-3
Alan Ling – RA: 26.00645-2
Ana Clara Verticchio Franzolin – RA: 26.00774-0
Leticia Hallal Longo RA: 25.11735-9
Arco peixe
-
Arco peixe médio
-
Arco peixe grande

Montagem e encaixes
-
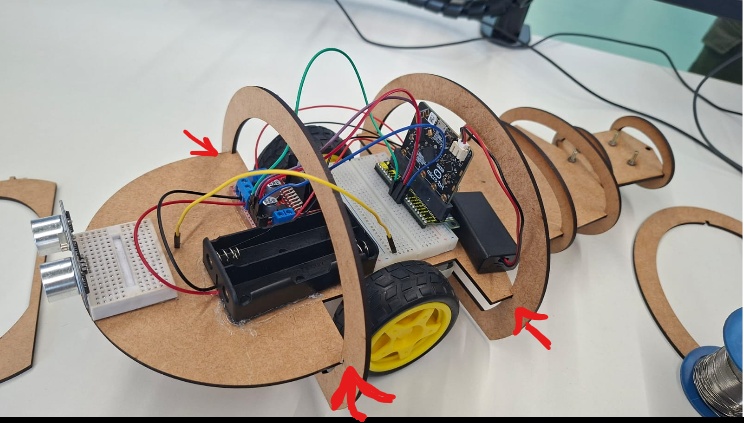
Agora com as peças impressas, encaixaremos a peça BASE nas frestas em formato de quadrado da peça ARCO GRANDE.
Os dois arcos serão encaixados próximos ao pneu e depois colados com cola quente.
-
Agora utilizaremos o parafuso para o encaixe da cauda MÉDIA, posicione a cauda MÉDIA e o furo dela a baixo do furo da peça BASE, coloque o parafuso de baixo para cima.
Agora rosqueie a porca ao ponto de permitir o movimento fluido, não aperte até prender
- Repita o mesmo processo, agora com a placa pequena.
- Coloque os duplos arcos em suas respectivas bases e cole-os com com cola quente.
- Faça o mesmo processo anterior, porém agora com as rodas. Utilize parafuso e parafusadeira (caso necessário), fixe as rodas nas suspensões do motor, fazendo-o se manter estável e hábil de rotacionar-se.
Anexo dos Componentes
-
Primeiro, utilizando a imagem como base, anexe o protoboard, no centro da base, através da retirada da fita dupla-face e utilizando a face oposta grude encima da base do projeto. A seguir, utilizando cola quente, fixe o suporte (com a bateria) e a ponte H lado a lado na base, no posicionamento verticalmente superior do protoboard.
"Lembrando, NÃO DEIXE NADA OBSTRUIR A PASSAGEM DOS FIOS!!!!!!!"
Anexo dos Motores
-
A seguir, rotacione o protótipo em 180 graus para mantermos o verso exposto. A partir dessa etapa, utilize novamente a cola quente (verificando se a cola quente está realmente quente), fixe os motores conforme o posicionamento da imagem, de forma à proporcionar a possibilidade de manter as rodas expostas, com rotatividade adequada, e com os sentidos de referência . "Lembrando, NÃO DEIXE NADA OBSTRUIR A PASSAGEM DOS FIOS!!!!!!!"
Programação
-
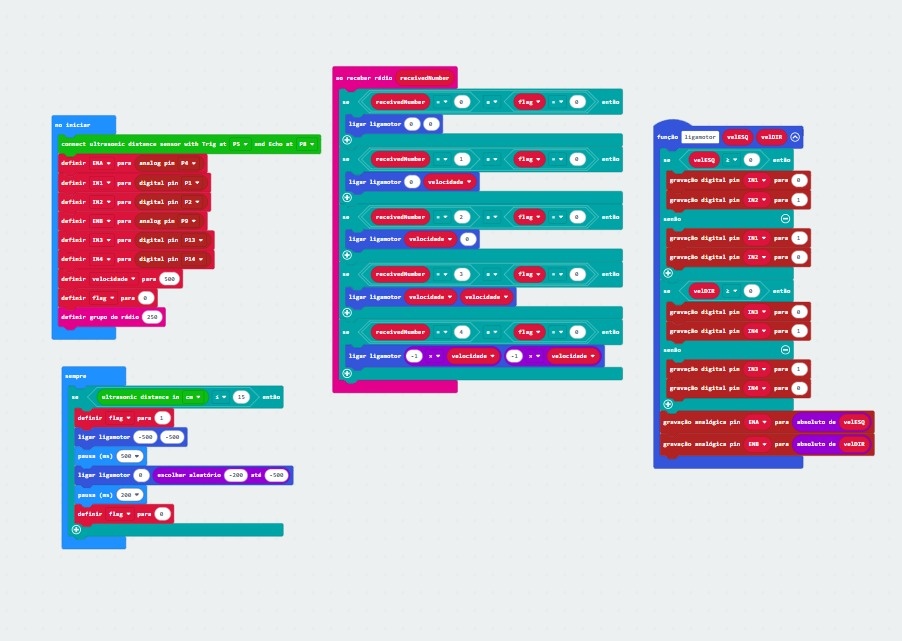
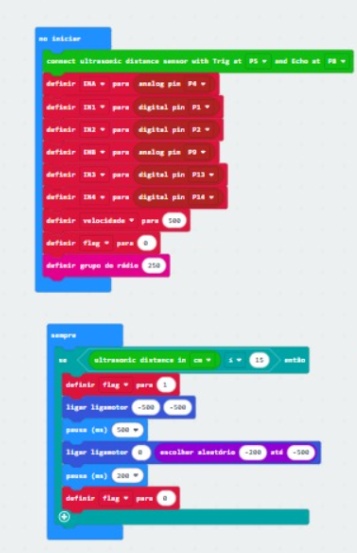
Essa etapa da programação é responsável tanto pelo controle de movimento quanto pelo sistema de anticolisão do robô. Para isso, o controle é realizado por meio da comunicação via rádio entre dois dispositivos Microbit, permitindo que os comandos sejam enviados e executados em tempo real.
-
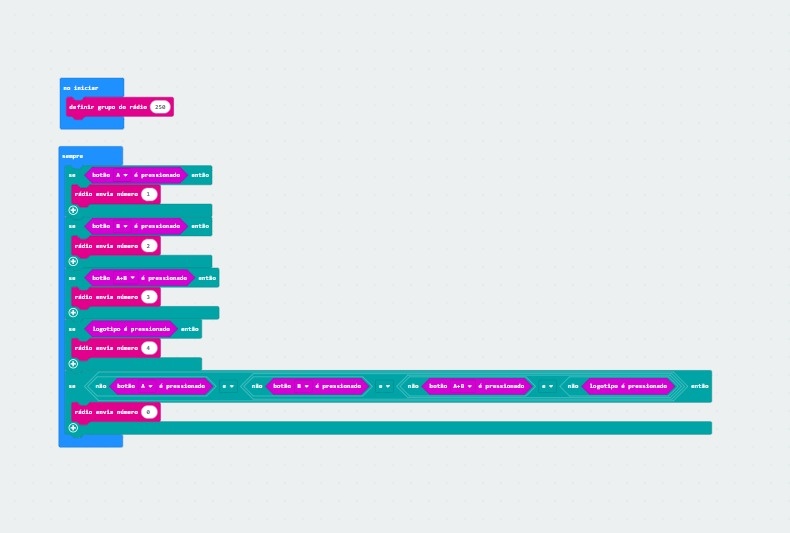
Os comandos para isso está conforme a imagem acima, em documentos separados respectivamente entre controle e sistema do projeto. E para acessar o arquivo, você precisa acessar o site oficial do Microbit para utilizá-lo.
-
programação do sistema
-
programação do controle
Anticolisão
-
Além disso, um sensor de distância monitora continuamente o ambiente ao redor do robô. Quando um obstáculo é detectado dentro da faixa de segurança estabelecida, a programação interpreta essa informação e, consequentemente, aciona automaticamente uma manobra de afastamento. Dessa forma, o sistema evita colisões e, assim, garante uma operação mais segura e eficiente.
-
Os comandos para isso está conforme a imagem acima, em documento especificamente salvo no sub-etapa. E para acessar o arquivo, você precisa acessar o site oficial do Microbit para utilizá-lo.
Customização
-
Agora chegou a parte onde todos esperavam!!! A sessão artística:D
Nessa etapa, preencha o seu peixe com o material que você preferir, no nosso caso, utilizamos espuma e a ajustamos na forma do MDF para ficar bonito. Esta etapa será fundamental para tanto, a sustentação/suporte do peixe, quando o aprimoramento da elegância visual.
Depois estilize e cubra o peixe com o material de sua preferência, ou que você tiver em casa (fita crepe, lona, etc). É possível reutilizar aquele material que seria descartado. Tenha em mente que este material não pode ser muito comprido porque se não vai enroscar na roda ou arrastar no chão.
Por fim, caso decida customizar ainda mais o seu peixe, você pode acrescentar detalhes extras como olhos, nadadeiras, escamas, caudas, entre outros cosméticos para aprimorar o nível de detalhes e o realismo de seu mascote.
Apreciação
- Pronto! Agora precisamos que você encare, observe, olhe, aprecie e contemple seu incrível projeto! Parabéns pelo empenho!
Conclusão
O projeto tem a finalidade de monitorar áreas com obstáculos diversos, sendo capaz de desviar e não bater nos mesmos, de forma autônoma. Tanto a parte da montagem, quanto da programação não são complicadas de se produzir, além de ser customizável e de fácil manuseio.
A proposta do “Peixoto” é de incentivar o interesse das pessoas ao ramo da robótica, por ser versátil, intuitivo e simples de construir. É possível utilizar materiais já disponíveis em sua casa, permitindo a reutilização de algo que seria descartado.
O grupo responsável pela criação do projeto é composto por alunos do 1º semestre do curso de engenharia, sendo eles:
Afonso de Oliveira – RA: 26.00334-3
Alan Ling – RA: 26.00645-2
Ana Clara Verticchio Franzolin – RA: 26.00774-0
Leticia Hallal Longo RA: 25.11735-9
Comentários
2esse peixoto parece um Magikarp 😗
Pura perfeição!!!!