

O nosso projeto é o Mini Robô Capivara, criado com o objetivo de ajudar no monitoramento ambiental. A ideia foi unir hardware, software e consciência ecológica em uma solução prática e criativa. Inspirado na capivara, o robô coleta informações como temperatura e qualidade do ar, ajudando a acompanhar as condições do ambiente. Com esse projeto, buscamos mostrar como a tecnologia pode ser usada de forma sustentável para contribuir com a preservação da natureza.
Materiais Necessários
- 2 placas micro:bit
- 1 ponte H
- 2 motores
- 2 rodas compatíveis com os motores
- 1 suporte de pilhas para os motores
- 1 protoboard
- vários jumpers macho-macho e macho-fêmea
- 1 chassi para o carrinho
- 1 rodízio
- papelão, MDF e EVA
Ferramentas Necessárias
- Chave de fenda
- Tesoura
- Estilete
- Pistola de cola quente
- Fita Dupla Face
- Cortadora a lazer
- Software Solidworks
- Software Micro:bit
Etapas
Construção do Robô
-
Montagem Mecânica
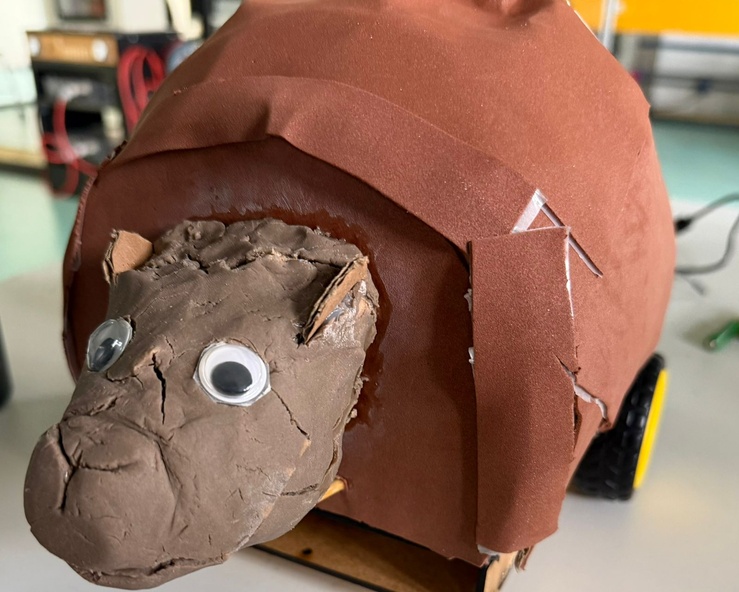
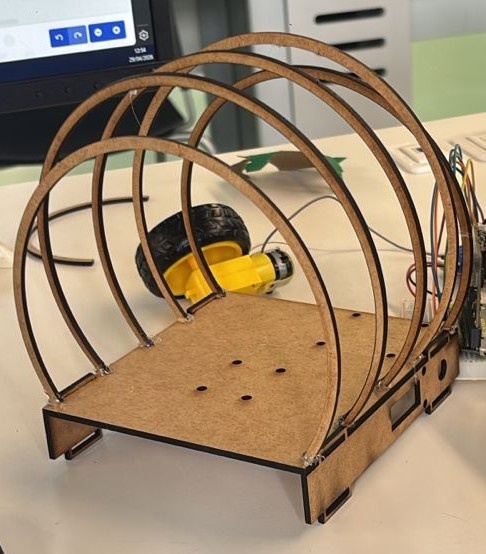
O Mini Robô Capivara foi construído utilizando um chassi leve e resistente, projetado para acomodar os motores, sensores e componentes eletrônicos. A estrutura foi inspirada na capivara e o principal objetivo foi garantir estabilidade e permitir a movimentação adequada do robô durante os testes.
-
Montagem Eletrônica
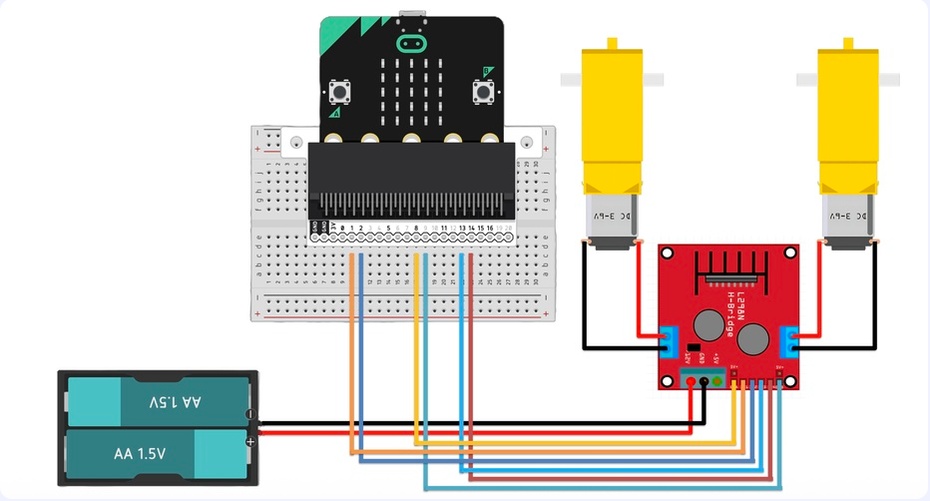
A montagem eletrônica pode ser dividida em três partes:
- conexão do micro:bit com a ponte H;
- conexão da ponte H com os motores;
- alimentação dos motores com uma fonte externa.
O micro:bit envia sinais para controlar os dois motores por meio de pinos digitais e pinos analógicos. A ponte H recebe esses sinais e aciona os motores.
A ligação da Ponte H com o micro:bit foi:
- Controle de velocidade do motor esquerdo: P8
- Sentido do motor esquerdo - IN1: P1
- Sentido do motor esquerdo - IN2: P2
- Controle de velocidade do motor direito: P9
- Sentido do motor direito - IN3: P13
- Sentido do motor direito - IN4: P14
Programação do robô
-
O micro:bit controlador do robô
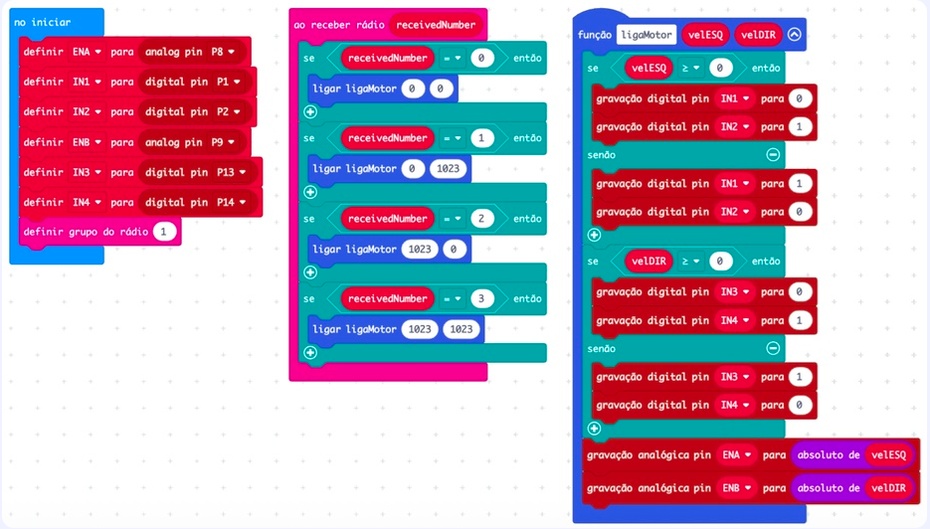
O micro:bit instalado no robô recebe comandos por rádio e transforma esses comandos em movimento.
No programa, primeiro foi configurado os pinos usados para controlar a ponte H, o grupo do rádio foi definido como 1 e executou uma função para ligar os motores conforme o número recebido. A seguir é apresentado a lógica do programa utilizada, incluindo os comandos recebidos por rádio e a função de acionamento dos motores.
A lógica usada:
- Ao receber 0: parar
- Ao receber 1: acionar motor direito (virar para esquerda)
- Ao receber 2: acionar motor esquerdo (virar para direita)
- Ao receber 3: andar para frente
-
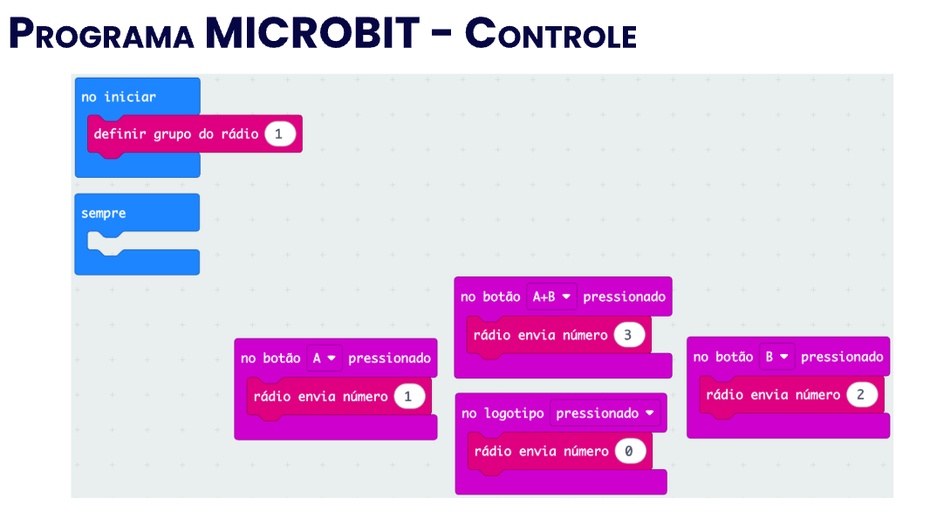
O micro:bit do controle
O segundo micro:bit funciona como controle.
No programa do controle também foi utilizado o grupo de rádio 1 e foi enviados números diferentes quando os botões foram pressionados.
Programa:
- Botão A: Envia 1, gira para a esquerda
- Botão A: Envia 2, gira para a direita
- Botão A+B: Envia 3, avança para frente
- Nenhum Botão pressionado: Envia 0, robô parado
Testes e Melhorias Possíveis
-
Testes do Projeto
Durante os testes, verificamos:
Funcionamento dos motores;
Comunicação entre os Micro:bits;
Resposta aos comandos do controle;
Leitura dos sensores ambientais;
Estabilidade do robô durante a movimentação.
Os resultados mostraram que o sistema foi capaz de realizar o monitoramento ambiental e executar os movimentos programados com sucesso. -
Problemas comuns e como resolver
Durante o desenvolvimento, alguns desafios foram identificados, como ajustes na comunicação por rádio e organização da fiação.
Esses problemas foram solucionados por meio de testes, correções na programação e melhorias na montagem dos componentes. -
Melhorias Possíveis
Algumas melhorias que podem ser implementadas são:
Inclusão de mais sensores ambientais;
Aumento da autonomia da bateria;
Desenvolvimento de um aplicativo para visualização dos dados;
Sistema de desvio automático de obstáculos;
Armazenamento e análise histórica das informações coletadas.
Conclusão
O desenvolvimento do Mini Robô Capivara foi uma experiência muito importante para nossa equipe, pois nos permitiu aplicar na prática conhecimentos de programação, eletrônica e robótica. Ao longo do projeto, enfrentamos desafios e buscamos soluções para tornar o robô funcional e eficiente.
Além do aprendizado técnico, o projeto mostrou como a tecnologia pode ser usada para contribuir com a preservação do meio ambiente. Com o monitoramento de informações como temperatura e qualidade do ar, o Mini Robô Capivara demonstra que pequenas iniciativas podem gerar grandes impactos quando unimos inovação e consciência ecológica.
Por fim, o projeto nos ajudou a desenvolver habilidades como trabalho em equipe, organização e resolução de problemas, tornando essa uma experiência única tanto do ponto de vista acadêmico quanto pessoal.
Comentários
0