


Deseja criar um robo de monitoramento que mede a temperatura e a luminosidade a partir do micro bit?
Neste projeto, duas placas micro:bit se comunicam por rádio: uma fica na mão do operador e a outra no robô. O carrinho é movido por dois motores DC controlados por uma ponte H, e pode ser montado com materiais simples, reciclados ou de kits educacionais.
A ideia surgiu na disciplina Engenharia, Sustentabilidade e Impacto Social, do curso de Engenharia de Controle e Automação, dentro de um contexto de robôs para monitoramento de biomas. O projeto inclui a montagem eletrônica e os códigos separados para o robô e para o controle.
Materiais Necessários
- Microbit
- Placa de MDF
- Ponte H
- Protoboard
- 2 motores DC com caixa de redução
- 2 rodas compatíveis com os motores
- 2 suporte de pilhas e um suporte de bateria para os motores
- Fio Macho-Macho
- Fio Femea-Macho
- Galão de agua de 5 litros
- Tinta laranja
- Tinta branca
- Tinta preta
- Tinta azul
- Spray de tinta laranja
- Spray de tinta azul
- Spray de tinta vermelha
Ferramentas Necessárias
- Régua
- Caneta Preta
- Cola quente
- Impressora 3D
- Estilete
- SolidWorks
- Fita dupla face
- Fita durex
- Chave philips
- Paquimetro
- Pinceis
- Broca de mesa
- Cortadora a laser
Etapas
Modelagem
-
Medição dos materiais utilizados:
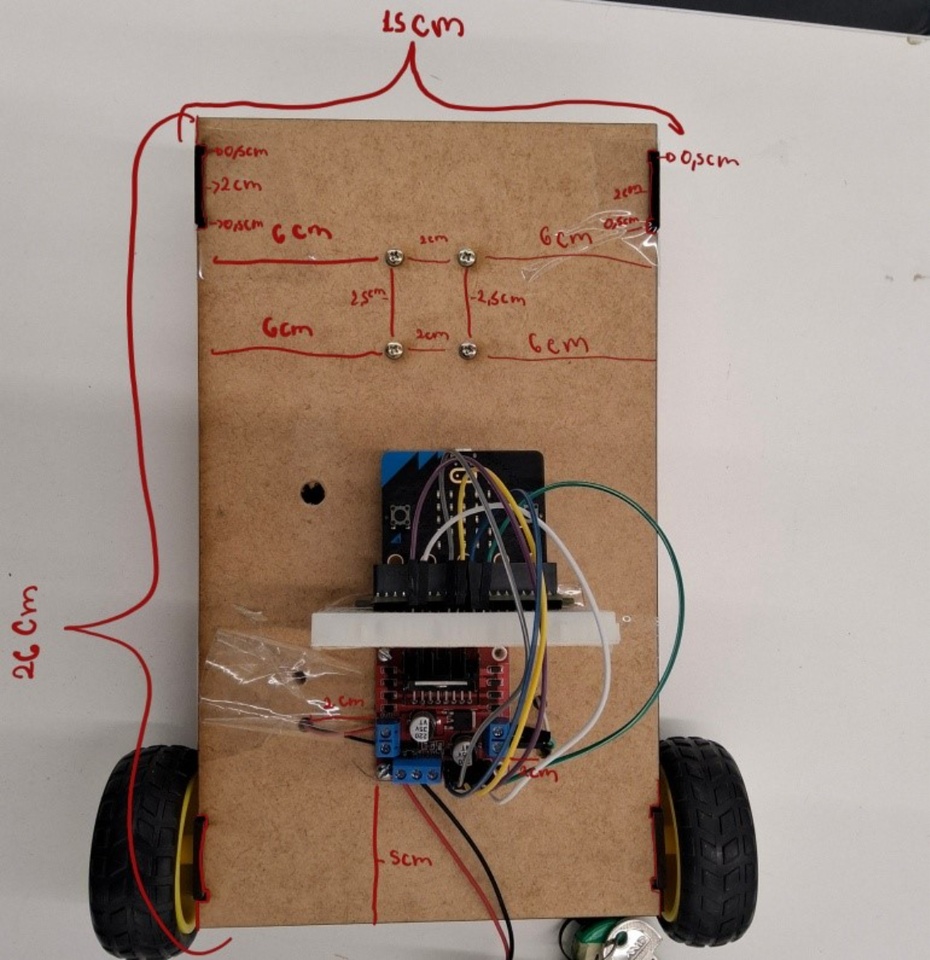
Utilizamos como toda o inicio da nossa medição a madeira que iria ser a nossa base. Foi medido como que o Microbit, as rodas, o arduino e a bateria iria caber na base. Você pode usar o que quiser para montar o chassi, desde que seja uma base sólida, essa parte não passa de uma recomendação. -
Base Snail (Parte de Cima):
Para fazer a base onde tudo se apoiaria foi utilizado uma placa de MDF. No total a base é feita de 4 peças, 2 retangulos 26x15cm.
A Parte de cima é um Retangulo de 26x15cm com partes de encaixe que tem 0,5cm esta a 1 cm da borda e a 2 cm do outro buraco de encaixe de 0,5cm. Eles estão em todas as bordas.
Além disso vale ressaltar que a roda de roldana será encaixada nessa parte. Faça os quatros furos para o encaixe do parafuso com as medidas apresentadas na imagem.
-
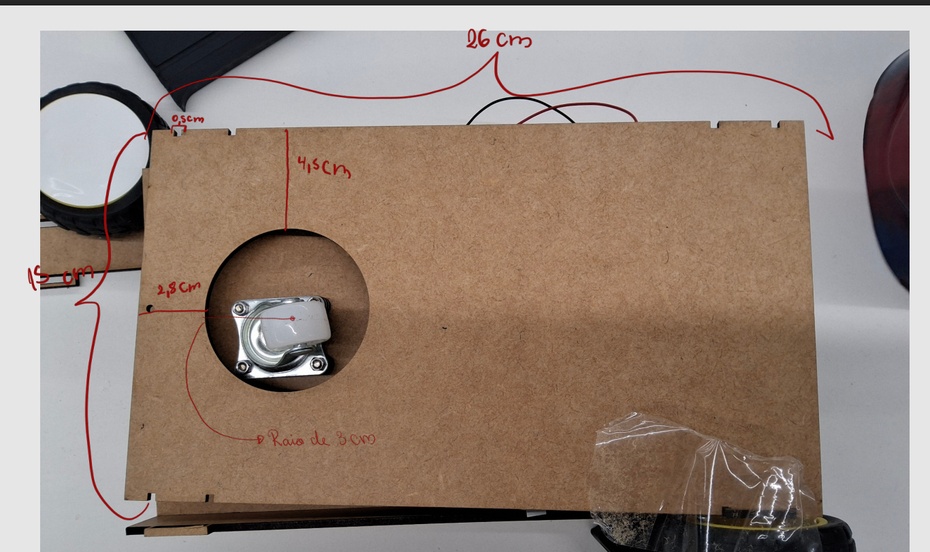
Parte de Baixo:
Retangulo 26x15cm que possui um buraco de 6 cm de diâmetro a 2,8 centimetros da borda de 15 cm e a 4,5 centimetros da borda de 26 cm, alem disso também possuem as partes de encaixe que tem 0,5cm esta a 1 cm da borda e a 2 cm do outro buraco de encaixe de 0,5cm. Eles estão em todas as bordas.
-
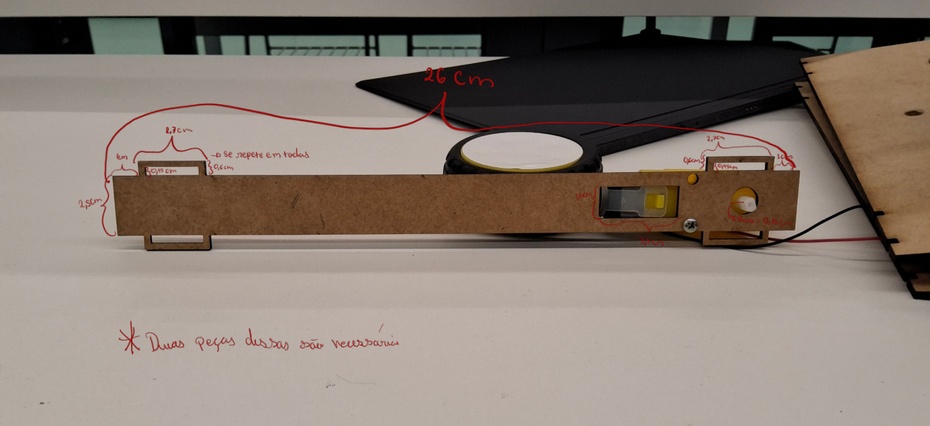
Juntas:
A outra peça é a peça que encaixa as duas junções, e onde vai ser encaixado as rodas, ela tem o mesmo tamanho de comprimento e 2,5 cm de altura sendo uma peça de 26x2,5cm. Para partes mais especificas havera uma imagem com os tamanhos.
A forma na qual a base foi construido foi inspiração em uma carrenagem disponibilizada pelos professores do Instituto Mauá de Tecnlogia, e a precisão do corte so foi possivel ser obtida atravez do envio de um CAD do SolidWorks para uma maquina que corta MDF em alta precisão.
Além disso vale ressaltar que nessa peça será pregada ao motor, que devera ter a parte que encaixa a roda saindo pelo buraco (é necessarío que seja possivel desencaixar o motor da roda para caber), assim como está na imagem.
-
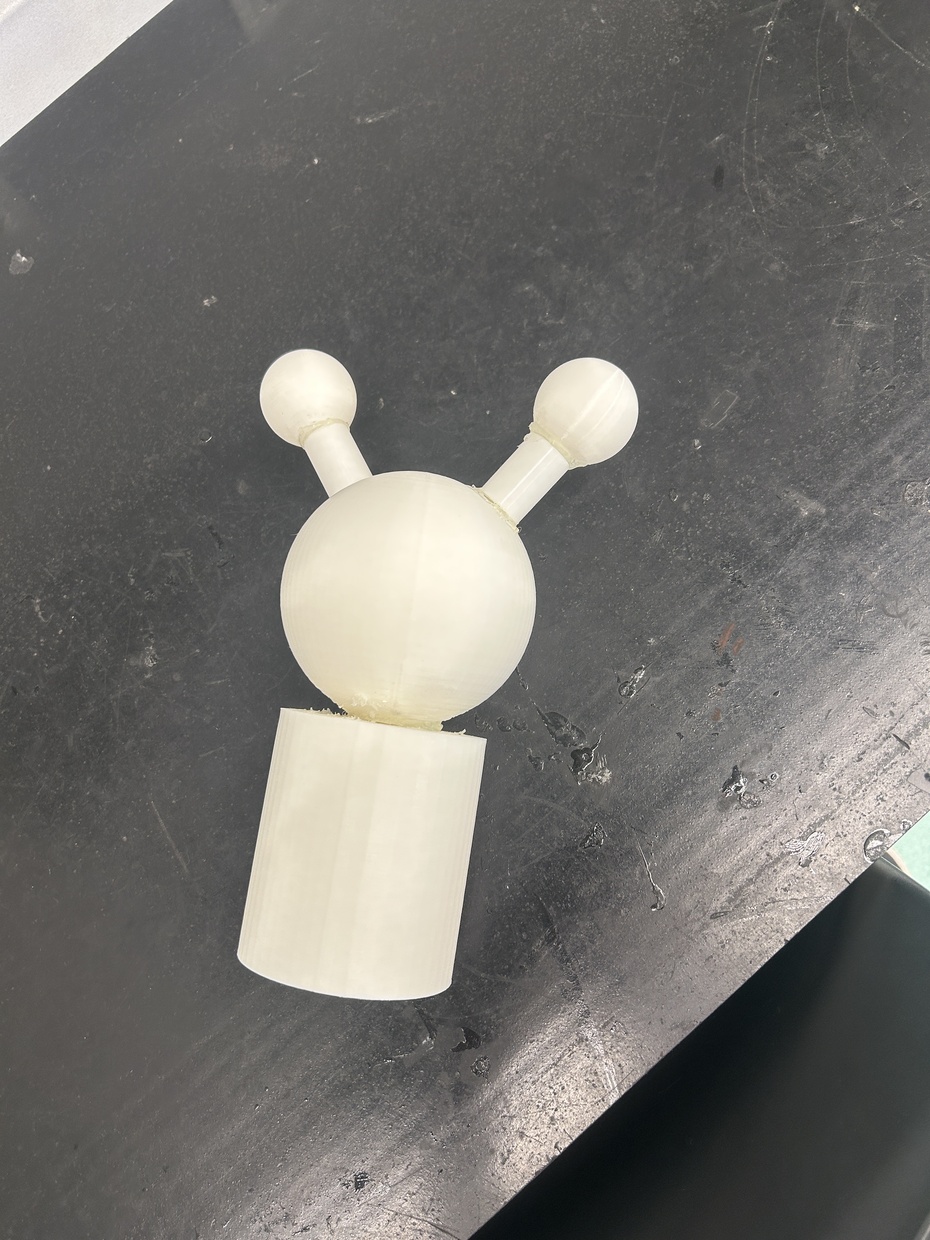
Cabeça Snail:
Após a etapa de medição, para fazermos a cabeça do caracol usamos o aplicativo SolidWorks. No qual imprimimos com uma impressora 3D três cilindros e tres bolas com as seguintes medidas:
1 cilindro com 4 centimetros de raio e 9 centimetros de altura.
1 bola com 4,5 centimetros de raio.
2 cilindros com 0,75 centimetros de raio e 3 centimetros de altura.
2 bolas com 1 centimetro de raio.
O link com os 6 itens estará disponivel para a utilização da impressão:
https://mauabr-my.sharepoint.com/:f:/g/personal/26_00809-4_maua_br/IgDRtwBcKEoCT5oBWeSg442KAdrVW9DcfFD_vift3K5vj9s?e=VlMrr8
Impressão:
Para imprimir a cabeça do Snail no FabLab que possui uma impressora 3D de filamento, utilizando o filamento PLA-1,75mm.
-
Cortar galão de agua
Para realizar o casco do Snail, utilizamos um galão de 5 litros e cortamos exatamente quando começa a se juntar.
O galão possui 17 cm de altura
Tanto a cabeça quanto o casco podem ser feitos de qualquer material pois é decorativo.
-
Pintura:
Utilizados spays e tintas para esse processo

Programação
-
MicroBit
A programação foi feita no MakeCode MicroBit. O código permite controlar o robo para frente (rodando as duas rodas ao mesmo tempo), para direita (rodando a roda da esquerda, enquanto a da direita fica imóvel),para esquerda (rodando a roda da direta, enquanto a da esquerta fica imóvel), parar o robo (ambas das rodas ficam imóvel), medir a temperatura em graus celcius e o nível de luz do ambiente. Para realizar essas ações é preciso ter 2 microbits V2, sendo um o controle (transmissor) e o outro com a programação do robô (receptor). OBS: utilizamos 200 de velocidade na programação.
A seguir é apresentado a lógica do programa do robô, incluindo os comandos recebidos por rádio e a função de acionamento dos motores:
Ao pressionar A: rádio envia número 1 - ativa o motor da direita
Ao pressionar B: rádio envia número 2 - ativa o motor da esquerda
Ao pressionar AB: rádio envia número 3 - ativa as duas rodas
Ao pressionar o logotipo: rádio envia número 5 - mede o nivel de luz (de 0 a 255; escala adimencional)
Ao agitar o microbit: rádio envia número 4 - mostra a temperatura (°C)
Ao virar a tela para baixo: rádio envia número 0 - desliga os dois motores
Caso queria acessar os codigos de programação basta clicar nos links abaixo:
Programação do robô: https://makecode.microbit.org/S76204-76452-77832-83375
Programação do controle: https://makecode.microbit.org/S23890-15402-55397-38984 -
Montagem do circuito
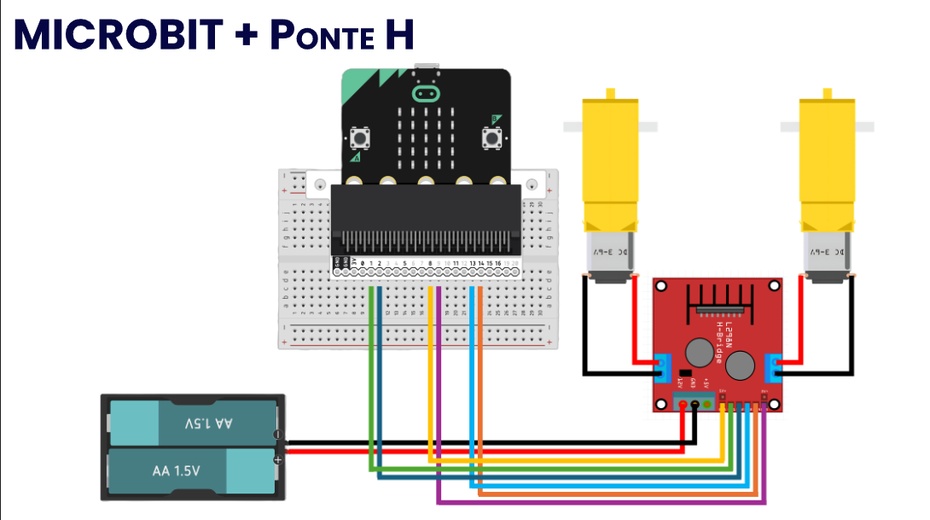
A montagem do circuito foi feita seguindo as intruções dos professores do Instituto Mauá de Tecnologia. Para fazer ele basta seguir o esquema. Serão utilizados uma protoborde, 2 bateria (3,7 V), 4 pilhas AA (1,5 V), 2 microbits (V2), 2 motores de roda e uma ponte H.
Uma possível ligação da Ponte-H e do microbit é:
- Controle de velocidade do motor esquerdo: P8
- Sentido do motor esquerdo - IN1: P5
- Sentido do motor esquerdo - IN2: P6
- Controle de velocidade do motor direito: P9
- Sentido do motor direito - IN3: P1
- Sentido do motor direito - IN4: P2
(A ligação do protoboard não está igual a da imagem, por favor verificar)
-
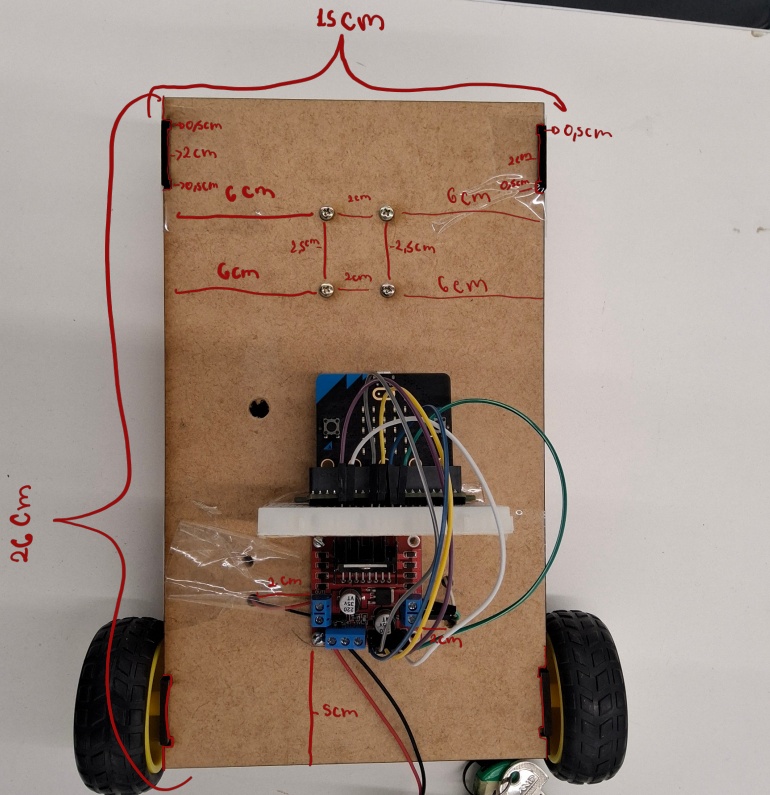
Circuito na Base:
Depois da montagem devesse encaixar o circuito com o microbit a 5 centimetros da base de 15 cm e centralizado com o arduino sendo posicionado de maneira vertical para ser possivel colocar o galão de agua dentro dele. Para a conexão do circuito com as rodas será necessario fazer furos para que os fio cheguem a parte de baixo do robô para conectar com as rodas, o furo foi feito a 2cm de distancia do microbit (distância irrelevante, pode variar sem nenhum problema)
-
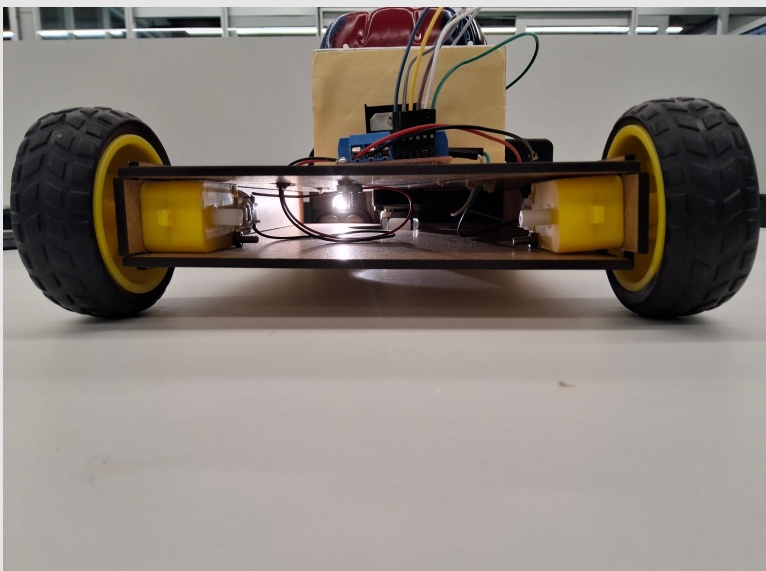
Como que o andar de baixo se apresenta:
Assim que dever ser a aparencia, com as rodas laterais sendo conectadas com os fios, e as parte de cima com sendo a base da roda de roldana
Teste e Melhorias
-
Teste:
Durante o teste tente observar o que está acontecendo. A roda esta indo para o sentido correto? Ela vai reto quando deveria ir reto?, o comando funciona a uma distancia adequada?, o chassi está se desmontando?.
Tudo isso pode indicar algum problema na hora da montagem. -
Problemas:
Problema: rodas virando em sentidos opostos: Possível causa: O programa está fazendo com que uma das rodas girem no sentido horário e outro no sentido anti-horário. Solução: para resolver isso basta ir na programação e inverter um dos sentidos da roda.
Problema: Chassi se desmontando: Possível causa: montagem não está firme. Solução: caso o chassi saia do lugar, é possivel usar pregos ou durex para o conserto.
Problema: Roda não vai completamente reto: Possivel causa: Uma das rodas pode estar levemente inclinado para dentro. Solução: deixar as rotas retas.
(Nosso maior desafio foi descobrir que a ponte H não estava funcionando, é importante realizar uma checagem nos materias que serão utilizados) -
Melhorias:
Acreditamos que um chassi diferente poderia ser melhor para a adequação do caracol.
Casco e cabeça feita de maneira diferente como argila ou isopor.
Deixar os fios menos bagunçados
Conclusão
Este projeto é uma excelente porta de entrada para a robótica, pois reúne em uma só atividade: montagem física, eletrônica, programação em blocos e comunicação.
É uma experiencia que faz entender o que é ser engenheiro, testar e errar, além de aprender bastante.
Comentários
1fofinho 🤗